| ||
| ||
| ||
| ||
| ||
|
SPG Manual
Description: OpenSS7 Online Manuals
A PDF version of this document is available here.
OpenSS7
OpenSS7 STREAMS Programmer’s Guide
About This Manual
This is Edition 7.20141001, last updated 2014-10-25, of The OpenSS7 STREAMS Programmer’s Guide, for Version 1.1 release 7.20141001 of the OpenSS7 package.
Preface
Acknowledgements
As with most open source projects, this project would not have been possible without the valiant efforts and productive software of the Free Software Foundation, the Linux Kernel Community, and the open source software movement at large.
Sponsors
Funding for completion of the OpenSS7 OpenSS7 package was provided in part by:
| • | Monavacon Limited | |
| • | OpenSS7 Corporation |
Additional funding for The OpenSS7 Project was provided by:
Contributors
The primary contributor to the OpenSS7 OpenSS7 package is Brian F. G. Bidulock. The following is a list of notable contributors to The OpenSS7 Project:
| - Per Berquist | - Kutluk Testicioglu | ||
| - John Boyd | - John Wenker | ||
| - Chuck Winters | - Angel Diaz | ||
| - Peter Courtney | - Jérémy Compostella | ||
| - Tom Chandler | - Sylvain Chouleur | ||
| - Gurol Ackman | - Christophe Nolibos | ||
| - Pierre Crepieux | - Bryan Shupe | ||
| - Christopher Lydick | - D. Milanovic | ||
| - Omer Tunali | - Tony Abo | ||
| - John Hodgkinson | - Others |
Supporters
Over the years a number of organizations have provided continued support in the form of assessment, inspection, testing, validation and certification.
Telecommunications
Aerospace and Military
Financial, Business and Security
Education, Health Care and Nuclear Power
| • | IEEE Computer Society | • | Ateb | ||
| • | ENST 4 | • | Mandexin Systems Corporation | ||
| • | HTW-Saarland 5 | ||||
| • | Kansas State University | • | Areva NP | ||
| • | University of North Carolina Charlotte | • | European Organization for Nuclear Research |
Agencies
It would be difficult for the OpenSS7 Project to attain the conformance and certifications that it has without the free availability of specifications documents and standards from standards bodies and industry associations. In particular, the following:
Of these, ICAO, ISO, IEEE and EIA have made at least some documents publicly available. ANSI is notably missing from the list: at one time draft documents were available from ANSI (ATIS), but that was curtailed some years ago. Telecordia does not release any standards publicly. Hopefully these organizations will see the light and realize, as the others have, that to remain current as a standards organization in today’s digital economy requires providing individuals with free access to documents.
Authors
The authors of the OpenSS7 package include:
| - Brian Bidulock |
Maintainer
The maintainer of the OpenSS7 package is:
| - Brian Bidulock |
Please send bug reports to bugs@openss7.org using the send-pr script included in the package, only after reading the BUGS file in the release, or See ‘Problem Reports’.
Document Information
Notice
This package is released and distributed under the GNU Affero General Public License (see GNU Affero General Public License). Please note, however, that there are different licensing terms for the manual pages and some of the documentation (derived from OpenGroup6 publications and other sources). Consult the permission notices contained in the documentation for more information.
This document, is released under the GNU Free Documentation License (see GNU Free Documentation License) with no sections invariant.
Abstract
This document provides a STREAMS Programmer’s Guide for OpenSS7.
Objective
The objective of this document is to provide a guide for the STREAMS programmer when developing STREAMS modules, drivers and application programs for OpenSS7.
This guide provides information to developers on the use of the STREAMS mechanism at user and kernel levels.
STREAMS was incorporated in UNIX System V Release 3 to augment the character input/output (I/O) mechanism and to support development of communication services.
STREAMS provides developers with integral functions, a set of utility routines, and facilities that expedite software design and implementation.
Intent
The intent of this document is to act as an introductory guide to the STREAMS programmer. It
is intended to be read alone and is not intended to replace or supplement the
OpenSS7 manual pages. For a reference for writing code, the manual pages
(see STREAMS(9)) provide a better reference to the programmer.
Although this describes the features of the OpenSS7 package,
OpenSS7 Corporation is under no obligation to provide any software,
system or feature listed herein.
Audience
This document is intended for a highly technical audience. The reader should already be familiar with Linux kernel programming, the Linux file system, character devices, driver input and output, interrupts, software interrupt handling, scheduling, process contexts, multiprocessor locks, etc.
The guide is intended for network and systems programmers, who use the STREAMS mechanism at user and kernel levels for Linux and UNIX system communication services.
Readers of the guide are expected to possess prior knowledge of the Linux and UNIX system, programming, networking, and data communication.
Revisions
Take care that you are working with a current version of this document: you will not be notified of updates. To ensure that you are working with a current version, contact the Author, or check The OpenSS7 Project website for a current version.
A current version of this document is normally distributed with the OpenSS7 package.
Version Control
$Log: SPG2.texi,v $ Revision 1.1.2.3 2011-07-27 07:52:12 brian - work to support Mageia/Mandriva compressed kernel modules and URPMI repo Revision 1.1.2.2 2011-02-07 02:21:33 brian - updated manuals Revision 1.1.2.1 2009-06-21 10:40:06 brian - added files to new distro
ISO 9000 Compliance
Only the TeX, texinfo, or roff source for this document is controlled. An opaque (printed, postscript or portable document format) version of this document is an UNCONTROLLED VERSION.
Disclaimer
OpenSS7 Corporation disclaims all warranties with regard to this documentation including all implied warranties of merchantability, fitness for a particular purpose, non-infringement, or title; that the contents of the document are suitable for any purpose, or that the implementation of such contents will not infringe on any third party patents, copyrights, trademarks or other rights. In no event shall OpenSS7 Corporation be liable for any direct, indirect, special or consequential damages or any damages whatsoever resulting from loss of use, data or profits, whether in an action of contract, negligence or other tortious action, arising out of or in connection with any use of this document or the performance or implementation of the contents thereof.
OpenSS7 Corporation reserves the right to revise this software and documentation for any reason, including but not limited to, conformity with standards promulgated by various agencies, utilization of advances in the state of the technical arts, or the reflection of changes in the design of any techniques, or procedures embodied, described, or referred to herein. OpenSS7 Corporation is under no obligation to provide any feature listed herein.
U.S. Government Restricted Rights
If you are licensing this Software on behalf of the U.S. Government ("Government"), the following provisions apply to you. If the Software is supplied by the Department of Defense ("DoD"), it is classified as "Commercial Computer Software" under paragraph 252.227-7014 of the DoD Supplement to the Federal Acquisition Regulations ("DFARS") (or any successor regulations) and the Government is acquiring only the license rights granted herein (the license rights customarily provided to non-Government users). If the Software is supplied to any unit or agency of the Government other than DoD, it is classified as "Restricted Computer Software" and the Government’s rights in the Software are defined in paragraph 52.227-19 of the Federal Acquisition Regulations ("FAR") (or any successor regulations) or, in the cases of NASA, in paragraph 18.52.227-86 of the NASA Supplement to the FAR (or any successor regulations).
Organization
This guide has several chapters, each discussing a unique topic. Introduction, Overview, Mechanism and Processing contain introductory information and can be ignored by those already familiar with STREAMS concepts and facilities.
This document is organized as follows:
- Preface
Describes the organization and purpose of the guide. It also defines an intended audience and an expected background of the users of the guide.
- Introduction
An introduction to STREAMS and the OpenSS7 package. STREAMS Fundamentals. Presents an overview and the benefits of STREAMS.
- Overview
A brief overview of STREAMS.
- Mechanism
A description of the STREAMS framework. Describes the basic operations for constructing, using, and dismantling Streams. These operations are performed using
open(2s),close(2s),read(2s),write(2s), andioctl(2s).- Processing
Processing and procedures within the STREAMS framework. Gives an overview of the STREAMS put and service routines.
- Messages
STREAMS Messages, organization, types, priority, queueing, and general handling. Discusses STREAMS messages, their structure, linkage, queueing, and interfacing with other STREAMS components.
- Polling
Polling of STREAMS file descriptors and other asynchronous application techniques. Describes how STREAMS allows user processes to monitor, control, and poll Streams to allow an effective utilization of system resources.
- Modules and Drivers
An overview of STREAMS modules, drivers and multiplexing drivers. Describes the STREAMS module and driver environment, input-output controls, routines, declarations, flush handling, driver-kernel interface, and also provides general design guidelines for modules and drivers.
- Modules
Details of STREAMS modules, including examples. Provides information on module construction and function.
- Drivers
Details of STREAMS drivers, including examples. Discusses STREAMS drivers, elements of driver flow control, flush handling, cloning, and processing.
- Multiplexing
Details of STREAMS multiplexing drivers, including examples. Describes the STREAMS multiplexing facility.
- Pipes and FIFOs
Details of STREAMS-based Pipes and FIFOs. Provides information on creating, writing, reading, and closing of STREAMS-based pipes and FIFOs and unique connections.
- Terminal Subsystem
Details of STREAMS-based Terminals and Pseudo-terminals. Discusses STREAMS-based terminal and and pseudo-terminal subsystems.
- Synchronization
Discusses STREAMS in a symmetrical multi-processor environment.
- Reference
Reference section.
- Conformance
Conformance of the OpenSS7 package to other UNIX implementations of STREAMS.
- Portability
Portability of STREAMS modules and drivers written for other UNIX implementations of STREAMS and how they can most easily be ported into OpenSS7; but, for more details on this topic, see the OpenSS7 - STREAMS Portability Guide.
- Development
Development guidelines for developing portable STREAMS modules and drivers.
- Data Structures
Primary STREAMS Data Structures, descriptions of their members, flags, constants and use. Summarizes data structures commonly used by STREAMS modules and drivers.
- Message Types
STREAMS Message Type reference, with descriptions of each message type. Describes STREAMS messages and their use.
- Utilities
STREAMS kernel-level utility functions for the module or driver writer. Describes STREAMS utility routines and their usage.
- Debugging
STREAMS debugging facilities and their use. Provides debugging aids for developers.
- Configuration
STREAMS configuration, the STREAMS Administrative Driver and the autopush facility. Describes how modules and drivers are configured into the Linux and UNIX system, tunable parameters, and the autopush facility.
- Administration
Administration of the STREAMS subsystem.
- Examples
Collected examples.
Conventions Used
This guide uses texinfo typographical conventions.
Throughout this guide, the word STREAMS will refer to the mechanism and the word Stream will refer to the path between a user application and a driver. In connection with STREAMS-based pipes Stream refers to the data transfer path in the kernel between the kernel and one or more user processes.
Examples are given to highlight the most important and common capabilities of STREAMS. They are not exhaustive and, for simplicity, often reference fictional drivers and modules. Some examples are also present in the OpenSS7 package, both for testing and example purposes.
System calls, STREAMS utility routines, header files, and data structures are given using
texinfo filename typesetting, when they are mentioned in the text.
Variable names, pointers, and parameters are given using texinfo variable
typesetting conventions. Routine, field, and structure names unique to the examples are also given
using texinfo variable typesetting conventions when they are mentioned in the text.
Declarations and short examples are in texinfo ‘sample’ typesetting.
texinfo displays are used to show program source code.
Data structure formats are also shown in texinfo displays.
Other Documentation
Although the STREAMS Programmer’s Guide for OpenSS7 provides a guide to aid in
developing STREAMS applications, readers are encouraged to consult the
OpenSS7 manual pages. For a reference for writing code, the manual pages (see
STREAMS(9)) provide a better reference to the programmer.
For detailed information on
system calls used by STREAMS (section 2), and
STREAMS utilities from section 8.
STREAMS specific input output control (ioctl) calls are provided in streamio(7).
STREAMS modules and drivers are described on section 7.
STREAMS is also described to some extent in the System V Interface Definition, Third Edition.
UNIX Edition
This system conforms to UNIX System V Release 4.2 for Linux.
Related Manuals
OpenSS7 Installation and Reference Manual
Copyright
© 1997-2014 Monavacon Limited. All Rights Reserved.
1 Introduction
1.1 Background
STREAMS is a facility first presented in a paper by Dennis M. Ritchie in 1984,7 originally implemented on 4.1BSD and later part of Bell Laboratories Eighth Edition UNIX, incorporated into UNIX System V Release 3.0 and enhanced in UNIX System V Release 4 and UNIX System V Release 4.2. STREAMS was used in SVR4 for terminal input/output, pseudo-terminals, pipes, named pipes (FIFOs), interprocess communication and networking. Since its release in System V Release 4, STREAMS has been implemented across a wide range of UNIX, UNIX-like, and UNIX-based systems, making its implementation and use an ipso facto standard.
STREAMS is a facility that allows for a reconfigurable full duplex communications path, Stream, between a user process and a driver in the kernel. Kernel protocol modules can be pushed onto and popped from the Stream between the user process and driver. The Stream can be reconfigured in this way by a user process. The user process, neighbouring protocol modules and the driver communicate with each other using a message passing scheme closely related to MOM (Message Oriented Middleware). This permits a loose coupling between protocol modules, drivers and user processes, allowing a third-party and loadable kernel module approach to be taken toward the provisioning of protocol modules on platforms supporting STREAMS.
On UNIX System V Relase 4.2, STREAMS was used for terminal input-output, pipes, FIFOs (named pipes), and network communications. Modern UNIX, UNIX-like and UNIX-based systems providing STREAMS normally support some degree of network communications using STREAMS; however, many do not support STREAMS-based pipe and FIFOs8 or terminal input-output.9.
Linux has not traditionally implemented a STREAMS subsystem. It is not clear why, however, perceived ideological differences between STREAMS and Sockets and also the XTI/TLI and Sockets interfaces to Internet Protocol services are usually at the centre of the debate. For additional details on the debate, see About This Manual in OpenSS7 Frequently Asked Questions.
Linux pipes and FIFOs are SVR3-style, and the Linux terminal subsystem is BSD-like. UNIX 98 Pseudo-Terminals, ptys, have a specialized implementation that does not follow the STREAMS framework and, therefore, do not support the pushing or popping of STREAMS modules. Internal networking implementation under Linux follows the BSD approach with a native (system call) Sockets interface only.
RedHat at one time provided an Intel Binary Compatibility Suite (iBCS) module for Linux that supported the XTI/TLI interface and socksys system calls and input-output controls, but not the STREAMS framework (and therefore cannot push or pop modules).
OpenSS7 is the current open source implementation of STREAMS for Linux and provides all of the capabilities of UNIX System V Release 4.2 MP, plus support for mainstream UNIX implementations based on UNIX System V Release 4.2 MP through compatibility modules.
Although it is intended primarily as documentation for the OpenSS7 implementation of STREAMS, much of the OpenSS7 - STREAMS Programmer’s Guide is generally applicable to all STREAMS implementations.
1.2 What is STREAMS?
STREAMS is a flexible, message oriented framework for the development of GNU/Linux communications facilities and protocols. It provide a set of system calls, kernel resources, and kernel utilities within a framework that is applicable to a wide range of communications facilities including terminal subsystems, interprocess communication, and networking. It provides standard interfaces for communication input and output within the kernel, common facilities for device drivers, and a standard interface10 between the kernel and the rest of the GNU/Linux system.
The standard interface and mechanism enable modular, portable development and easy integration of
high performance network services and their components. Because it is a message passing
architecture, STREAMS does not impose a specific network architecture (as does the BSD
Sockets kernel architecture. The STREAMS user interface is uses the familiar UNIX
character special file input and output mechanisms
open(2s),
read(2s),
write(2s),
ioctl(2s),
close(2s); and provides additional system calls,
poll(2s),
getmsg(2s),
getpmsg(2s),
putmsg(2s),
putpmsg(2s), to assist in message passing between user-level applications and
kernel-resident modules. Also, STREAMS defines a standard set of input-output controls
(ioctl(2s)) for manipulation and configuration of STREAMS by a user-space
application.
As a message passing architecture, the STREAMS interface between the user process and kernel resident modules can be treated either as fully synchronous exchanges or can be treated asynchronously for maximum performance.
1.2.1 Characteristics
STREAMS has the the following characteristics that are not exhibited (or are exhibited in different ways) by other kernel level subsystems:
- STREAMS is based on the character device special file which is one of the most flexible special files available in the GNU/Linux system.
- STREAMS is a message passing architecture, similar to Message Oriented Middleware
(MOM) that achieves a high degree of functional decoupling between modules. This allows the
service interface between modules to correspond to the natural interfaces found or described between
protocol layers in protocol stack without requiring the implementation to conform to any given
model.
As a contrasting example, the BSD Sockets implementation, internal to the kernel, provides strict socket-protocol, protocol-protocol and protocol-device function call interfaces.
- By using
putandserviceprocedures for each module, and schedulingserviceprocedures, STREAMS combines background scheduling of coroutine service procedures with message queueing and flow control to provide a mechanism robust for both event driven subsystem and soft real-time subsystem.In contrast, BSD Sockets, internal to the kernel, requires the sending component across the socket-protocol, protocol-protocol, or protocol-device to handle flow control. STREAMS integrates flow control within the STREAMS framework.
- STREAMS permits user runtime configuration of kernel data structure and modules to provide for a wide range of novel configurations and capabilities in a live GNU/Linux system. The BSD Sockets protocol framework does not provide this capability.
- STREAMS is as applicable to termination input-output and interprocess communication as
it is to networking protocols.
BSD Sockets is only applicable to a restricted range of networking protocols.
- STREAMS provides mechanisms (the pushing and popping of modules, and the linking and
unlinking of Streams under multiplexing drivers) for complex configuration of protocol stacks;
the precise topology being typically under the control of user space daemon processes.
No other kernel protocol stack framework provides this flexible capability. Under BSD Sockets it is necessary to define specialized socket types to perform these configuration functions and not in any standard way.
1.2.2 Components
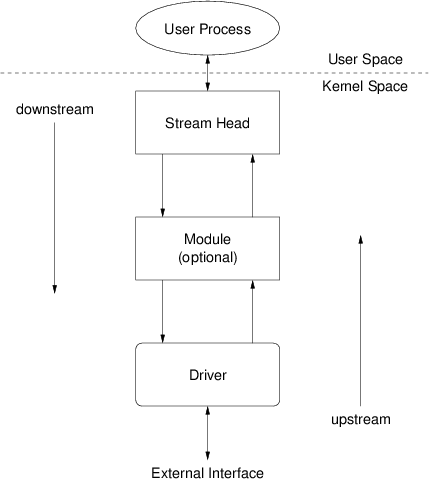
STREAMS provides a full-duplex communications path for data and control information between a kernel-resident driver and a user space process (see Figure 101).
Within the kernel, a Stream is comprised of the following basic components:
- A Stream head that is inside the Linux kernel, but which sits closest to the user space process. The Stream head is responsible for communicating with user space processes and that presents the standard STREAMS I/O interface to user space processes and applications.
- A Stream end or Driver that is inside the Linux kernel, but which sits farthest from the user space process. A Stream end or Driver that interfaces to hardware or other mechanisms within the Linux kernel.
- A Module that sits between the Stream head and Stream end. The Module provides modular and flexible processing of control and data information passed up and down the Stream.
1.2.2.1 Stream head
A Stream head is the component of a Stream that is closest to the user space process. The Stream head is responsible for directly communicating with the user space process in user context and for converting system calls to actions performed on the Stream head or the conversion of control and data information passed between the user space process and the Stream in response to system calls. All Streams are associate with a Stream head. In the case of STREAMS-based pipes, the Stream may be associated with two (interconnected) Stream heads. Because the Stream head follows the same structure as a Module, it can be viewed as a specialized module.
With STREAMS, pipes and FIFOs are also STREAMS-based.11 STREAMS-based pipes and FIFOs do not have a Driver component.
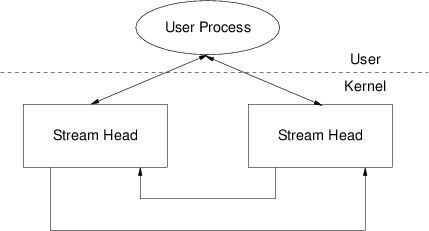
STREAMS-based pipes place another Stream head in the position of the Driver. That is, a STREAMS-based pipe is a full-duplex communications path between two otherwise independent Stream heads. Modules may be placed between the Stream heads in the same fashion as they can exist between a Stream head and a Driver in a normal Stream. A STREAMS-based pipe is illustrated in Figure 102.
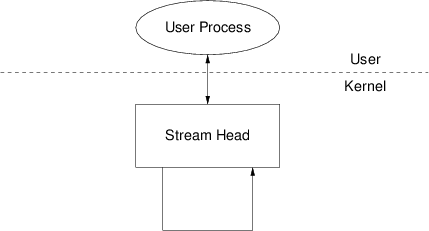
STREAMS-based FIFOs consist of a single Stream head that has its downstream path connected to its upstream path where the Driver would be located. Modules can be pushed under this single Stream Head. A STREAMS-based FIFO is illustrated in Figure 109.
For more information on STREAMS-based pipes and FIFOs, see Pipes and FIFOs.
1.2.2.2 Module
A STREAMS Module is an optional processing element that is placed between the Stream head and the Stream end. The Module can perform processing functions on the data and control information flowing in either direction on the Stream. It can communicate with neighbouring modules, the Stream head or a Driver using STREAMS messages. Each Module is self-contained in the sense that it does not directly invoke functions provided by, nor access data structures of, neighbouring modules, but rather communicates data, status and control information using messages. This functional isolation provides a loose coupling that permits flexible recombination and reuse of Modules. A Module follows the same framework as the Stream head and Driver, has all of the same entry points and can use all of the same STREAMS and kernel utilities to perform its function.
Modules can be inserted between a Stream head and Stream end (or another
Stream head in the case of a STREAMS-based pipe or FIFO). The insertion and deletion of
Modules from a Stream is referred to as pushing and popping a Module
due to the fact that that modules are inserted or removed from just beneath the Stream head in
a push-down stack fashion. Pushing and popping of modules can be performed using standard
ioctl(2s) calls and can be performed by user space applications without any need for kernel
programming, assembly, or relinking.
For more information on STREAMS modules, see Module Component.
1.2.2.3 Driver
All Streams, with the sole exception of STREAMS-based pipe and FIFOs, contain a Driver a the Stream end. A STREAMS Driver can either be a device driver that directly or indirectly controls hardware, or can be a pseudo-device driver that interface with other software subsystems within the kernel. STREAMS drivers normally perform little processing within the STREAMS framework and typically only provide conversion between STREAMS messages and hardware or software events (e.g. interrupts) and conversion between STREAMS framework data structures and device related data structures.
For more information on STREAMS drivers, see Driver Component.
1.2.2.4 Queues
Each component in a Stream (Stream head, Module, Driver) has an associated pair of queues. One queue in each pair is responsible for managing the message flow in the downstream direction from Stream head to Stream end; the other for the upstream direction. The downstream queue is called the write-side queue in the queue pair; the upstream queue, the read-side queue.
Each queue in the pair provides pointers necessary for organizing the temporary storage and
management of STREAMS messages on the queue, as well as function pointers to procedures
to be invoked when messages are placed on the queue or need to be taken off of the
queue, and pointers to auxiliary and module-private data structures. The read-side
queue also contains function pointers to procedures used to open and close
the Stream head, Module or Driver instance associated with the queue pair.
Queue pairs are dynamically allocated when an instance of the driver, module or
Stream head is created and deallocated when the instance is destroyed.
For more information on STREAMS queues, see Queue Component.
1.2.2.5 Messages
STREAMS is a message passing architecture. STREAMS messages can contain control information or data, or both. Messages that contain control information are intended to illicit a response from a neighbouring module, Stream head or Stream end. The control information typically uses the message type to invoke a general function and the fields in the control part of the message as arguments to a call to the function. The data portion of a message represents information that is (from the perspective of the STREAMS framework) unstructured. Only cooperating modules, the Stream head or Stream end need know or agree upon the format of control or data messages.
A STREAMS message consists of one or more blocks. Each block is a 3-tuple of a message block,
a data block and a data buffer. Each data block has a message type, and the data buffer contains
the control information or data associated with each block in the message. STREAMS messages
typically consist of one control-type block (M_PROTO) and zero or more data-type blocks
(M_DATA), or just a data-type block.
A set of specialized and standard message types define messages that can be sent by a module or driver to control the Stream head. A set of specialized and standard message types define messages that can be sent by the Stream head to control a module or driver, normally in response to a standard input-output control for the Stream.
STREAMS messages are passed between a module, Stream head or Driver using a
put procedure associated with the queue in the queue pair for the direction in which
the message is being passed. Messages passed toward the Stream head are passed in the
upstream direction, and those toward the Stream end, in the downstream direction.
The read-side queue in the queue pair associated with the module instance to which a message
is passed is responsible for processing or queueing upstream messages; the write-side
queue, for processing downstream messages.
STREAMS messages are generated by the Stream head and passed downstream in
response to
write(2s),
putmsg(2s), and
putpmsg(2s) system calls; they are
also consumed by the Stream head and converted to information passed to user space in response
to
read(2s),
getmsg(2s), and
getpmsg(2s) system calls.
STREAMS messages are also generated by the Driver and passed upstream to ultimately be read by the Stream head; they are also consumed when written by the Stream head and ultimately arrive at the Driver.
For more information on STREAMS messages, see Message Component.
1.3 Basic Streams Operations
This section provides a basic description of the user level interface and system calls that are used to manipulate a Stream.
A Stream is similar, and indeed is implemented, as a character device special file and is
associated with a character device within the GNU/Linux system. Each STREAMS character
device special file (character device node, see mknod(2)) has associated with it a major
and minor device number. In the usual situation, a Stream is associated with each minor
character device node in a similar fashion to a minor device instance for regular character device
drivers.
STREAMS devices are opened, as are character device drivers, with the
open(2s) system
call.12 Opening a minor device node accesses a separate Stream instance between the
user level process and the STREAMS device driver. As with normal character devices, the file
descriptor returned from the
open(2s) call, can be used to further access the Stream.
Opening a minor device node for the first time results in the creation of a new instance of a Stream between the Stream head and the driver. Subsequent opens of the same minor device node does not result in the creation of a new Stream, but provides another file descriptor that can be used to access the same Stream instance. Only the first open of a minor device node will result in the creation of a new Stream instance.
Once it has opened a Stream, the user level process can send and receive data to and from the
Stream with the usual
read(2s) and
write(2s) system calls that are
compatible with the existing character device interpretations of these system calls. STREAMS
also provides the additional system calls,
getmsg(2s) and
getpmsg(2s), to read
control and data information from the Stream, as well as
putmsg(2s) and
putpmsg(2s) to write control and data information. These additional system calls provide a
richer interface to the Stream than is provided by the traditional
read(2s) and
write(2s) calls.
A Stream is closed using the
close(2s) system call (or a call that closes file
descriptors such as
exit(2)). If a number of processes have the Stream open, only
the last
close(2s) of a Stream will result in the destruction of the Stream
instance.
1.3.1 Basic Operations Example
An basic example of opening, reading from and writing to a Stream driver is shown in Listing 1.1.
The example in Listing 1.1 is for a communications device that provide a communications channel for data transfer between two processes or hosts. Data written to the device is communicated over the channel to the remote process or host. Data read from the device was written by the remote process or host.
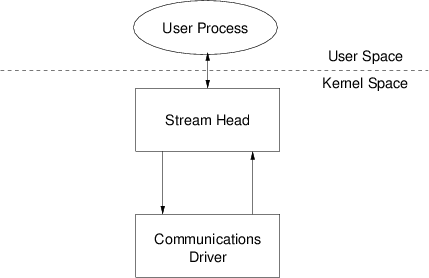
In the example in Listing 1.1, a simple Stream is opened using the
open(2s)
call. /dev/streams/comm/1 is the path to the character minor device node in the file system.
When the device is opened, the character device node is recognized as a STREAMS special file,
and the STREAMS subsystem creates a Stream (if one does not already exist for the minor
device node) an associates it with the minor device node. Figure 103 illustrates the state of the
Stream at the point after the
open(2s) call returns.
The while loop in Listing 1.1 simply reads data from the device using the
read(2s) system call and then writes the data back to the device using the
write(2s) system call.
When a Stream is opened for blocking operation (i.e., neither O_NONBLOCK nor
O_NDLEAY were set),
read(2s) will block until some data arrives. The
read(2s) call might, however, return less that the requested ‘1024’ bytes. When data
is read, the routine simply writes the data back to the device.
STREAMS implements flow control both in the upstream and downstream directions. Flow control limits the amount of normal data that can be queued awaiting processing within the Stream. High and low water marks for flow control are set on a queue pair basis. Flow control is local and specific to a given Stream. High priority control messages are not subject to STREAMS flow control.
When a Stream is opened for blocking operation (i.e., neither O_NONBLOCK nor
O_NDLEAY were set),
write(2s) will block while waiting for flow control to
subside.
write(2s) will always block awaiting the availability of STREAMS message
blocks to satisfy the call, regardless of the setting of O_NONBLOCK or
O_NDELAY.
In the example in Listing 1.1, the
exit(2) system call is used to exit the program;
however, the
exit(2) results in the equivalent of a call to
close(2s) for all
open file descriptors and the Stream is flushed and destroyed before the program is finally
exited.
1.4 Components
This section briefly describes each STREAMS component and how they interact within a Stream. Chapters later in this manual describe the components and their interaction in greater detail.
1.4.1 Queues
This subsection provides a brief overview of message queues and their associated procedures.
A queue provides an interface between an instance of a STREAMS driver, module or Stream head, and the other modules and drivers that make up a Stream for a direction of message flow (i.e., upstream or downstream). When an instance of a STREAMS driver, module or Stream head is associated with a Stream, a pair of queues are allocated to represent the driver, module or Stream head within the Stream. Queue data structures are always allocated in pairs. The first queue in the pair is the read-side or upstream queue in the pair; the second queue, the write-side or downstream queue.
Queues are described in greater detail in Queues and Priority.
1.4.1.1 Queue Procedures
This subsection provides a brief overview of queue procedures.
The STREAMS module, driver or Stream head provides five procedures that are associated
with each queue in a queue pair: the put, service, open,
close and admin procedures. Normally the open and close
procedures (and possibly the optional admin procedure) are only associated with the
read-side of the queue pair.
Each queue in the pair has a pointer to a put procedure. The put procedure is
used by STREAMS to present a new message to an upstream or downstream queue. At the ends of
the Stream, the Stream head write-side, or Stream end read-side, queue
put procedure is normally invoked using the put(9s) utility. A module within the
Stream typically has its put procedure invoked by an adjacent module, driver or
Stream head that uses the putnext(9) utility from its own put or
service procedure to pass message to adjacent modules. The put procedure of the
queue receiving the message is invoked. The put procedure decides whether to process the
message immediately, queue the message on the message queue for later processing by the queue’s
service procedure, or whether to pass the message to a subsequent queue using
putnext(9).
Each queue in the pair has a pointer to an optional service procedure. The purpose of a
service procedure process messages that were deferred by the put procedure by
being placed on the message queue with utilities such as putq(9). A service
procedure typically loops through taking messages off of the queue and processing them. The
procedure normally terminates the loop when it can not process the current message (in which case it
places the message back on the queue with putbq(9)), or when there is no longer any
messages left on the queue to process. A service procedure is optional in the sense that
if the put procedure never places any messages on the queue, a service procedure
is unnecessary.
Each queue in the pair also has a pointer to a open and close procedure;
however, the qi_qopen and qi_qclose pointers are only significant in the read-side
queue of the queue pair.
The queue open procedure for a driver is called each time that a driver (or Stream
head) is opened, including the first open that creates a Stream and upon each successive open
of the Stream. The queue open procedure for a module is called when the module is
first pushed onto (inserted into) a Stream, and for each successive open of a Stream
upon which the module has already been pushed (inserted).
The queue close procedure for a module is called whenever the module is popped (removed)
from a Stream. Modules are automatically popped from a Stream on the last close of the
Stream. The queue close procedure for a driver is called with the last close of the
Stream or when the last reference to the Stream is relinquished. If the Stream is
linked under a multiplexing driver (I_LINK(7) (see streamio(7))), or has been named with fattach(3),
then the Stream will not be dismantled on the last close and the close procedure not
called until the Stream is eventually unlinked (I_UNLINK(7) (see streamio(7))) or detached
(fdetach(3)).
Procedures are described in greater detail in Procedures.
1.4.2 Messages
This subsection provides a brief overview of STREAMS messages.
In fitting with the concept of function decoupling, all control and data information is passed
between STREAMS modules, drivers and the Stream head using messages. Utilities are
provided to the STREAMS module writer for passing messages using queue and message pointers.
STREAMS messages consist of a 3-tuple of a message block structure (msgb(9)), a data
block structure (datab(9)) and a data buffer. The message block structure is used to
provide an instance of a reference to a data block and pointers into the data buffer. The data
block structure is used to provide information about the data buffer, such as message type, separate
from the data contained in the buffer. Messages are normally passed between STREAMS modules,
drivers and the Stream head using utilities that invoke the target module’s put
procedure, such as put(9s), putnext(9), qreply(9). Messages travel along
a Stream with successive invocations of each driver, module and Stream head’s
put procedure.
Messages are described in greater detail in Messages Overview and Messages.
1.4.2.1 Message Types
This subsection provides a brief overview of STREAMS message types.
Each data block (datab(9)) is assigned a message type. The message type discriminates the
use of the message by drivers, modules and the Stream head. Most of the message types may be
assigned by a module or driver when it generates a message, and the message type can be modified as
a part of message processing. The Stream head uses a wider set of message types to perform
its function of converting the functional interface to the user process into the messaging interface
used by STREAMS modules and drivers.
Most of the defined message types (see Message Type Overview, and Message Types) are
solely for use within the STREAMS framework. A more limited set of message types
(M_PROTO, M_PCPROTO and M_DATA) can be used to pass control and data information
to and from the user process via the Stream head. These message type can be generated and
consumed using the read(2s), write(2s), getmsg(2s), getpmsg(2s),
putmsg(2s), putpmsg(2s) system calls and some streamio(7) STREAMS
ioctl(2s).
Message types are described in detail in Message Type Overview and Message Types.
1.4.2.2 Message Linkage
Messages blocks of differing types can be linked together into composite messages as illustrated in Figure 104.

Messages, once allocated, or when removed from a queue, exist standalone (i.e., they are not
attached to any queue). Messages normally exist standalone when they have been first allocated by
an interrupt service routine, or by the Stream head. They are placed into the Stream by
the driver or Stream head at the Stream end by calling put(9s). After being
inserted into a Stream, message normally only exist standalone in a given queue’s
put or service procedures. A queue’s put or service
procedure normally do one of the following:
- pass the message along to an adjacent queue with
putnext(9)orqreply(9); - process and consume the message by deallocating it with
freemsg(9); - place the message on the queue from the
putprocedure withputq(9)or from theserviceprocedure usingputbq(9).
Once placed on a queue, a message exists only on that queue and all other references to the message are dropped.
Only one reference to a message block (msgb(9)) exists within the STREAMS framework.
Additional references to the same data block (datab(9)) and data buffer can be established
by duplicating the messages block,
msgb(9) (without duplicating either the data
block,(datab(9), or data buffer). The STREAMS dupb(9) and
dupmsg(9) utilities can be used to duplicate message blocks. Also, the entire 3-tuple of
message block, data block and data buffer can be copied using the copyb(9) and
copymsg(9) STREAMS utilities.
When a message is first allocated, it is the responsibility of the allocating procedure to either
pass the message to a queue put procedure, place the message on its own message queue, or
free the message. When a message is removed from a message queue, the reference then becomes the
responsibility of the procedure that removed it from the queue. Under special circumstances, it
might be necessary to temporarily store a reference to a standalone message in a module private
data structure, however, this is usually not necessary.
When a message has been placed on a queue, it is linked into the list of messages already on the
queue. Messages that exist on a message queue await processing by the queue’s service
procedure. Essentially, queue put procedures are a way of performing immediate message
processing, and placing a message on a message queue for later processing by the queue’s
service procedure is a way of deferring message processing until a later time: that is,
until STREAMS schedules the service procedure for execution.
Two messages linked together on a message queue is illustrated in Figure 105. In the figure, ‘Message 2’ is linked to ‘Message 1’.
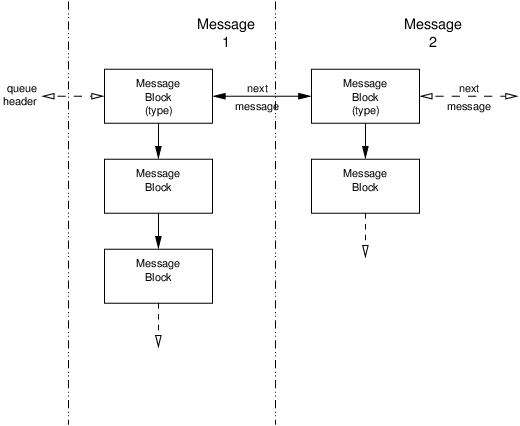
As illustrated in Figure 105, when a message exists on a message queue, the first message block in
the message (which can possibly contain a chain of message blocks) is linked into a double linked
list used by the message queue to order and track messages. The queue structure, queue(9),
contains the head and tail pointers for the linked list of messages that reside on the queue. Some
of the fields in the first message block (such as the linked list pointers) are significant only in
the first message block of the message and applies to all the message blocks in the message (such as
message band).
Message linkage is described in detail in Message Structure.
1.4.2.3 Message Queueing Priority
This subsection provides a brief overview of message queueing priority.
STREAMS message queues provide the ability to process messages of differing priority. There are three classes of message priority (in order of increasing priority):
- Normal messages.
- Priority messages.
- High-priority messages.
Normal messages are queued in priority band ‘0’. Priority messages are queued in bands greater than zero (‘1’ through ‘255’ inclusive). Messages of a higher ordinal band number are of greater priority. For example, a priority message for band ‘23’ is queued ahead of messages for band ‘22’. Normal and priority messages are subject to flow control within a Stream, and a queued according to priority.
High priority messages are assigned a priority band of ‘0’; however, their message type distinguishes them as high priority messages and they are queued ahead of all other messages. (The priority band for high priority messages is ignored and always set to ‘0’ whenever a high priority message type is queued.) High priority messages are given special treatment within the Stream and are not subjected to flow control; however, only one high priority message can be outstanding for a given transaction or operation within a Stream. The Stream head will discard high priority messages that arrive before a previous high priority message has been acted upon.
Because queue service procedures process messages in the order in which they appear in the
queue, messages that are queued toward the head of the queue yield a higher scheduling priority than
those toward the tail. High priority messages are queue first, followed by priority messages of
descending band numbers, finally followed by normal (band ‘0’) messages.
STREAMS provides independent flow control parameters for ordinary messages. Normal message flow
control parameters are contained in the queue structure itself (queue(9)); priority
parameters, in the auxiliary queue band structure (qband(9)). A set of flow control
parameters exists for each band (from ‘0’ to ‘255’).
As a high priority message is defined by message type, some message types are available in
high-priority/ordinary pairs (e.g., M_PCPROTO/M_PROTO) that perform the same function
but which have differing priority.
Queueing priority is described in greater detail in Queues and Priority.
1.4.3 Modules
This subsection provides a brief overview of STREAMS modules.
Modules are components of message processing that exist as a unit within a Stream beneath the Stream head. Modules are optional components and zero or more (up to a predefined limit) instances of a module can exist within a given Stream. Instances of a module have a unique queue pair associated with them that permit the instance to be linked among the other queue pairs in a Stream.
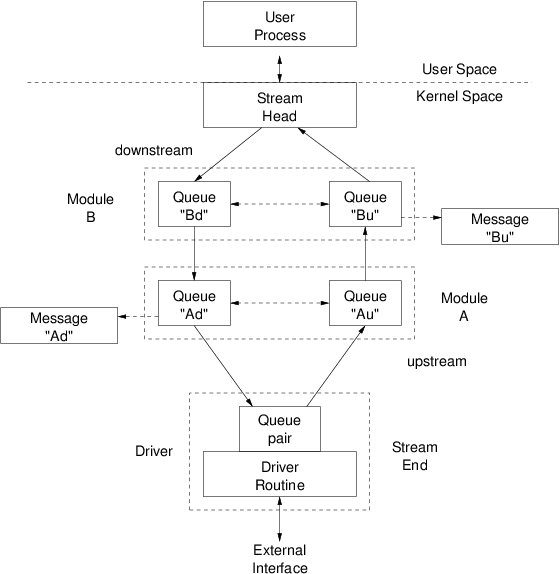
Figure 48 illustrates and instance each of two modules (‘A’ and ‘B’) that are linked within the same Stream. Each module instance consists of a queue pair (‘Ad/Au’ and ‘Bd/Bu’ in the figure). Messages flow from the driver to the Stream head through the upstream queues in each queue pair (‘Au’ and then ‘Bu’ in the figure); and from Stream head to driver through downstream queues (‘Bd’ and then ‘Ad’).
The module provides unique message processing procedures (put and optionally
service procedures) for each queue in the queue pair. One set of put and
service procedures handles upstream messages; the other set, downstream
messages. Each procedure is independent of the others. STREAMS handles the passing of
messages but any other information that is to be passed between procedures must be performed
explicitly by the procedures themselves. Each queue provides a module private pointer that can be
used by procedures for maintaining state information or passing other information between
procedures.
Each procedure can pass messages directly to the adjacent queue in either direction of message flow.
This is normally performed with the STREAMS putnext(9) utility. For example, in
Figure 48, procedures associated with queue ‘Bd’ can pass messages to queue ‘Ad’;
‘Bu’ to ‘Au’.
Also, procedures can easily locate the other queue in a queue pair and pass messages along the
opposite direction of flow. This is normally performed using the STREAMS qreply(9)
utility. For example, in Figure 48, procedures associated with queue ‘Ad’ can easily locate
queue ‘Au’ and pass messages to ‘Bu’ using
qreply(9).
Each queue in a module is associated with messages, processing procedures, and module private data. Typically, each queue in the module has a distinct set of message, processing procedures and module private data.
- Messages
-
Messages can be inserted into, and removed from, the linked list message queue associated with each queue in the queue pair as they pass through the module. For example, in Figure 48, ‘Message Ad’ exists on the ‘Ad’ queue; ‘Message Bu’, on the ‘Bu’ queue.
- Processing Procedures
-
Each queue in a module queue pair requires that a
putprocedure be defined for the queue. Upstream or downstream modules, drivers or the Stream head invoke aputprocedure of the module when they pass messages to the module along the Stream.Each queue may optionally provide a
serviceprocedure that will be invoked when messages are placed on the queue for later processing by theserviceprocedure. Aserviceprocedure is never required if the moduleputprocedure never enqueues a message to either queue in the queue pair.Either procedure in either queue in the pair can pass messages upstream or downstream and may alter information within the module private data associated with either queue in the pair.
- Data
-
Module processing procedures can make use of a pointer in each queue structure that is reserved for use by the module writer to locate module private data structures. These data structures are typically attached to each queue from the module’s
openprocedure, and detached from then module’scloseprocedure. Module private data is useful for maintaining state information associated with the instance of the module and for passing information between procedures.
Modules are described in greater detail in Modules.
1.4.4 Drivers
This subsection provides a brief overview of STREAMS drivers.
The Device component of the Stream is an initial part of the regular Stream (positioned just below the Stream head). Most Streams start out life as a Stream head connected to a driver. The driver is positioned within the Stream at the Stream end. Note that not all Streams require the presence of a driver: a STREAMS-based pipe or FIFO Stream do not contain a driver component.
A driver instance represented by a queue pair within the Stream, just as for modules. Also, each queue in the queue pair has a message queue, processing procedures, and private data associated with it in the same way as for STREAMS modules. There are three differences that distinguish drivers from modules:
- Drivers are responsible for generating and consuming messages at the Stream end.
Drivers convert STREAMS messages into appropriate software or hardware actions, events and data transfer. As a result, drivers that are associated with a hardware device normally contain an interrupt service procedure that handles the external device specific actions, events and data transfer. Messages are typically consumed at the Stream end in the driver’s downstream
putorserviceprocedure and action take or data transferred to the hardware device. Messages are typically generated at the Stream end in the driver’s interrupt service procedure, and inserted upstream using theput(9s)STREAMS utility.Software drivers (so-called pseudo-device drivers) are similar to a hardware device driver with the exception that they typically do not contain an interrupt service routine. Pseudo-device drivers are still responsible for consuming messages at the Stream end and converting them into actions and data output (external to STREAMS), as well as generating messages in response to events and data input (external to STREAMS).
In contrast, modules are intended to operate solely within the STREAMS framework.
- Because a driver sits at a Stream end and can support multiplexing, a driver can have
multiple Streams connected to it, either upstream (fan-in) or downstream (fan-out)
(see Multiplexing of Streams).
In contrast, an instance of a module is only connected within a single Stream and does not support multiplexing at the module queue pair.
- An instance of a driver (queue pair) is created and destroyed using the
open(2s)andclose(2s)system calls.In contrast, an instance of a module (queue pair) is created and destroyed using the
I_PUSHandI_POPSTREAMSioctl(2s)commands.
Aside from these differences, the STREAMS driver is similar in most respects to the STREAMS module. Both drivers and modules can pass signals, error codes, return values, and other information to processes in adjacent queue pairs using STREAMS messages of various message types provided for that purpose.
Drivers are described in greater detail in Drivers.
1.4.5 Stream Head
This subsection provide a brief overview of Stream heads.
The Stream head is the first component of a Stream that is allocated when a Stream is created. All Streams have an associated Stream head.
In the case of STREAMS-based pipes, two Stream heads are associated with each other. STREAMS-based FIFOs have one Stream head but no Stream end or Driver. For all other Streams, as illustrated in Figure 48, there exists a Stream head and a Stream end or Driver.
The Stream head has a queue pair associated with them, just as does any other STREAMS module or driver. Also, just as any other module, the Stream head provides the processing procedures and private data for processing of messages passed to queues in the pair.
The differences is that the processing procedures are provided by the GNU/Linux system rather than being written by the module or driver writer. These system provided processing procedures perform the necessary functions to convert generate to and consume messages from the Stream in response to system calls invoked by a user process. Also, a set of specialized behaviours are provided and a set of specialized message types that may be exchanged with modules and drivers in the Stream to provide the standard interface expected by the user application.
Stream heads are described in greater detail in Mechanism, Polling, Pipes and FIFOs, and Terminal Subsystem.
1.5 Multiplexing
This subsection provides a brief overview of Stream Multiplexing.
Basic Streams that can be created with the
open(2s) or
pipe(2s) system calls
are linear arrangements from Stream head to Driver or Stream head to Stream
head. Although these linear arrangements satisfy the needs of a large class of STREAMS
applications, there exits a class of application that are more naturally represented by
multiplexing: that is, an arrangements where one or more upper Streams feed into one or more
lower Streams. Network protocol stacks (a significant application are for STREAMS) are
typically more easily represented by multiplexed arrangements.
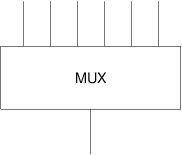
A fan-in multiplexing arrangement is one in which multiple upper Streams feed into a single lower Stream in a many-to-one relationship as illustrated in Figure 49.
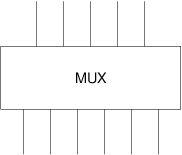
A fan-out multiplexing arrangement is one in which a single upper Stream feeds into multiple lower Streams in a one-to-many relationship as illustrated in Figure 50. (This is the more typically arrangement for communications protocol stacks.)

A fan-in/fan-out multiplexing arrangement is one in which multiple upper Streams feed into multiple lower Streams in a many-to-many relationship as illustrated in Figure 51.
To support these arrangements, STREAMS provide a mechanism that can be used to assemble multiplexing arrangements in a flexible way. An, otherwise normal, STREAMS pseudo-device driver can be specified to be a multiplexing driver.
Conceptually, a multiplexing driver can perform upper multiplexing between multiple Streams on its upper side connecting the user process and the multiplexing driver, and lower multiplexing between multiple Streams on its lower side connecting the multiplexing driver and the device driver.
As with normal STREAMS drivers, multiplexing drivers can have multiple Streams
created on its upper side using the
open(2s) system call. Unlike regular
STREAMS drivers, however, multiplexing drivers have the additional capability that other
Streams can be linked to the lower side of the driver. The linkage is performed by
issuing specialized
streamio(7) commands to to the driver that are recognized by
multiplexing drivers (I_LINK, I_PLINK, I_UNLINK,
I_PUNLINK).
Any Stream can be linked under a multiplexing driver (provided that it is not already linked under another multiplexing driver). This includes an upper Stream of a multiplexing driver. In this fashion, complex trees of multiplexing drivers and linear Stream segments containing pushed modules can be assembled. Using these linkage commands, complex arrangements can be assembled, manipulated and dismantled by a user or daemon process to suit application needs.
The fan-in arrangement of Figure 49 performs upper multiplexing; the fan-out arrangement of Figure 50, lower multiplexing; and the fan-in/fan-out arrangement of Figure 51, both upper and lower multiplexing.
1.5.1 Fan-Out Multiplexers
Figure 47 illustrates an example, closely related to the fan-out arrangement of Figure 50, where the Internet Protocol (IP) within a networking stack is implemented as a multiplexing driver and independent Streams to three specific device drivers are linked beneath the IP multiplexing driver.
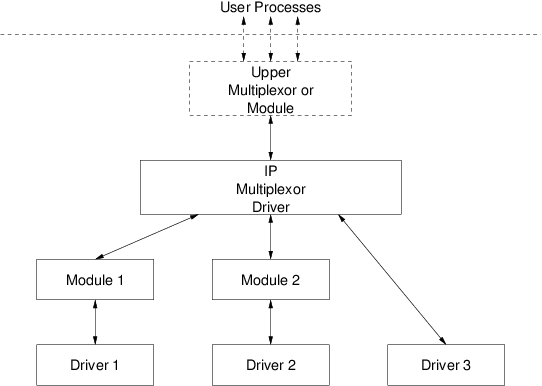
The IP multiplexing driver is capable of routing messages to the lower Streams on the basis of address and the subnet membership of each device driver. Messages received from the lower Streams can be discriminated an sent to the appropriate user process upper Stream (e.g. on the basis of, say, protocol Id). Each lower Stream, ‘Module 1’, ‘Module 2’, ‘Driver 3’, presents the same service interface to the IP multiplexing driver, regardless of the specific hardware or lower level communications protocol supported by the driver. For example, the lower Streams could all support the Data Link Provider Interface (DLPI).
As depicted in Figure 47, the IP multiplexing driver could have additional multiplexing drivers or modules above it. Also, ‘Driver 1’, ‘Driver 2’ or ‘Driver 3’ could themselves be multiplexing drivers (or replaced by multiplexing drivers). In general, multiplexing drivers are independent in the sense that it is not necessary that a given multiplexing driver be aware of other multiplexing drivers upstream of its upper Stream, nor downstream of its lower Streams.
1.5.2 Fan-In Multiplexers
Figure 52 illustrates an example, more closely related to the fan-in arrangement of Figure 49, where an X.25 Packet Layer Protocol multiplexing driver is used to switch messages between upper Streams supporting Permanent Virtual Circuits (PVCs) or Switch Virtual Circuits (SVCs) and (possibly) a single lower Stream.
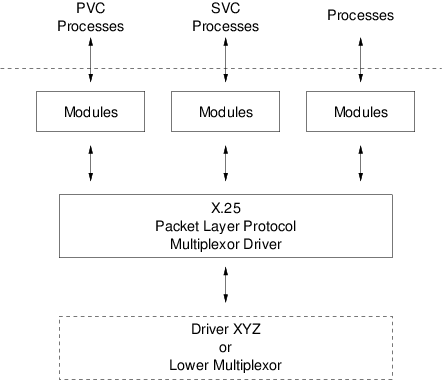
The ability to multiplex upper Streams to a driver is a characteristic supported by all
STREAMS drivers: not just multiplexing drivers. Each
open(2s) to a minor
device node results in another upper Stream that can be associated with the device driver.
What the multiplexing driver permits over the normal STREAMS driver is the ability to
link one or more lower Streams (possibly containing modules and another multiplexing driver)
beneath it.
1.5.3 Complex Multiplexers
When constructing multiplexers for applications, even more complicated arrangements are possible. Multiplexing over multiple Streams on both the upper and lower side of a multiplexing driver is possible. Also, a driver the provides lower multiplexing can be linked beneath a driver that provide upper multiplexing as depicted by the dashed box in Figure 52. Each multiplexing driver can perform upper multiplexing, lower multiplexing, or both, providing a flexibility for the designer.
STREAMS provides multiplexing as a general purpose facility that is flexible in that multiplexing drivers can be stacked and linked in a wide array of complex configurations. STREAMS imposes few restrictions on processing within the multiplexing driver making the mechanism applicable to a many classes of applications.
Multiplexing is described in greater detail in Multiplexing.
1.6 Benefits of STREAMS
STREAMS provides a flexible, scalable, portable, and reusable kernel and user level facility for the development of GNU/Linux system communications services. STREAMS allows the creation of kernel resident modules that offer standard message passing facilities and the ability for user level processes to manipulate and configure those modules into complex topologies. STREAMS offers a standard way for user level processes to select and interconnect STREAMS modules and drivers in a wide array of combinations without the need to alter Linux kernel code, recompile or relink the kernel.
STREAMS also assists in simplifying the user interface to device drivers and protocol stacks by providing powerful system calls for the passing of control information from user to driver. With STREAMS it is possible to directly implement asynchronous primitive-based service interfaces to protocol modules.
1.6.1 Standardized Service Interfaces
Many modern communications protocols define a service primitive interface between a service user and a service provider. Examples include the ISO Open Systems Interconnect (OSI) and protocols based on OSI such as Signalling System Number 7 (SS7). Protocols based on OSI can be directly implemented using STREAMS.
In contrast to other approaches, such as BSD Sockets, STREAMS does not impose a structured function call interface on the interaction between a user level process or kernel resident protocol module. Instead, STREAMS permits the service interface between a service user and service provider (whether the service user is a user level process or kernel resident STREAMS module) to be defined in terms of STREAMS messages that represent standardized service primitives across the interface.
A service interface is defined13 at the boundary between neighbouring modules. The upper module at the boundary is termed the service user and the lower module at the boundary is termed the service provider. Implemented under STREAMS, a service interface is a specified set of messages and the rules that allow passage of these messages across the boundary. A STREAMS module or driver that implements a service interface will exchange messages within the defined set across the boundary and will respond to received messages in accordance with the actions defined for the specific message and the sequence of messages preceding receipt of the message (i.e., in accordance with the state of the module).
Instances of protocol stacks are formed using STREAMS facilities for pushing modules and linking multiplexers. For proper and consistent operation, protocol stacks are assembled so that each neighbouring module, driver and multiplexer implement the same service interface. For example, a module that implements the SS7 MTP protocol layer, as shown in Figure 53, presents a protocol service interface at it input and output sides. Other modules, drivers and multiplexers should only be connected at the input and output sides of the SS7 MTP protocol module if they provide the same interface in the symmetric role (i.e., user or provider).
It is the ability of STREAMS to implement service primitive interfaces between protocol modules that makes it most appropriate for implementation of protocols based on the OSI service primitive interface such as X.25, Integrated Services Digital Network (ISDN), Signalling System No. 7 (SS7).
1.6.2 Manipulating Modules
STREAMS provides the ability to manipulate the configuration of drivers, modules and multiplexers from user space, easing configuration of protocol stacks and profiles. Modules, drivers and multiplexers implementing common service interfaces can be substituted with ease. User level processes may access the protocol stack at various levels using the same set of standard system calls, while also permitting the service interface to the user process to match that of the topmost module.
It is this flexibility that makes STREAMS well suited to the implementation of communications protocols based on the OSI service primitive interface model. Additional benefits for communications protocols include:
- User level programs use a service interface that is independent of underlying protocols, drivers, device implementation, and physical communications media.
- Communications architecture and upper layer protocols can be independent of underlying protocol, drivers, device implementation, and physical communications media.
- Communications protocol profiles can be created by selecting and connection constituent lower layer protocols and services.
The benefits of the STREAMS approach are protocol portability, protocol substitution, protocol migration, and module reuse. Examples provided in the sections that follow are real-world examples taken from the open source Signalling System No. 7 (SS7) stack implemented by the OpenSS7 Project.
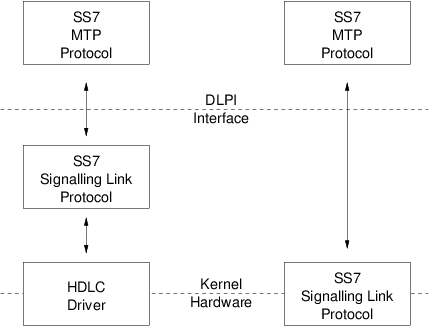
1.6.2.1 Protocol Portability
Figure 53, shows how the same SS7 Signalling Link protocol module can be used with different drivers on different machines by implementing compatible service interfaces. The SS7 Signalling Link are the Data Link Provider Interface (DLPI) and the Communications Device Interface (CDI) for High-Level Data Link Control (HDLC).
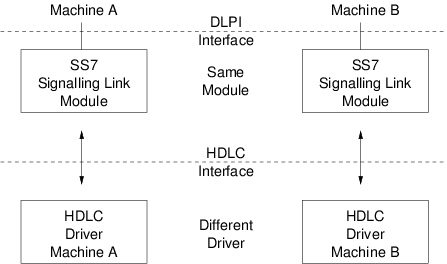
By using standard STREAMS mechanisms for the implementation of the SS7 Signalling Link module, only the driver needs to be ported to port an entire protocol stack from one machine to another. The same SS7 Signalling Link module (and upper layer modules) can be used on both machines.
Because the Driver presents a standardized service interface using STREAMS, porting a driver from the machine architecture of ‘Machine A’ to that of ‘Machine B’ consists of changes internal to the driver and external to the STREAMS environment. Machine dependent issues, such as bus architectures and interrupt handling are kept independent of the primary state machine and service interface. Porting a driver from one major UNIX or UNIX-like operating system and machine architecture supporting STREAMS to another is a straightforward task.
With OpenSS7, STREAMS provides the ability to directly port a large body of existing STREAMS modules to the GNU/Linux operating system.
1.6.2.2 Protocol Substitution
STREAMS permits the easy substitution of protocol modules (or device drivers) within a protocol stack providing a new protocol profile. When protocol modules are implemented to a compatible service interface the can be recombined and substituted, providing a flexible protocol architecture. In some circumstances, and through proper design, protocol modules can be substituted that implement the same service interface, even if they were not originally intended to be combined in such a fashion.
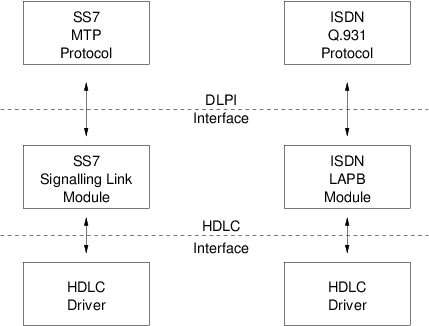
Figure 300 illustrates how STREAMS can substitute upper layer protocol modules to implement a different protocol stack over the same HDLC driver. As each module and driver support the same service interface at each level, it is conceivable that the resulting modules could be recombined to support, for example, SS7 MTP over an ISDN LAPB channel.14
Another example would be substituting an M2PA signalling link module for a traditional SS7 Signalling Link Module to provide SS7 over IP.
1.6.2.3 Protocol Migration
Figure 54 illustrates how STREAMS can move functions between kernel software and front end firmware. A common downstream service interface allows the transport protocol module to be independent of the number or type of modules below. The same transport module will connect without modification to either an SS7 Signalling Link module or SS7 Signalling Link driver that presents the same service interface.
The OpenSS7 SS7 Stack uses this capability also to adapt the protocol stack to front-end hardware that supports differing degrees of SS7 Signalling Link support in firmware. Hardware cards that support as much as a transparent bit stream can have SS7 Signalling Data Link, SS7 Signalling Data Terminal and SS7 Signalling Link modules pushed to provide a complete SS7 Signalling Link that might, on another hardware card, be mostly implemented in firmware.
By shifting functions between software and firmware, developers can produce cost effective, functionally equivalent systems over a wide range of configurations. They can rapidly incorporate technological advances. The same upper layer protocol module can be used on a lower capacity machine, where economics may preclude the use of front-end hardware, and also on a larger scale system where a front-end is economically justified.
1.6.2.4 Module Reusability
Figure 55 shows the same canonical module (for example, one that provides delete and kill processing on character strings) reused in two different Streams. This module would typically be implemented as a filter, with no downstream service interface. In both cases, a tty interface is presented to the Stream’s user process since the module is nearest the Stream head.

2 Overview
2.1 Definitions
2.2 Concepts
2.3 Application Interface
2.4 Kernel Level Facilities
2.5 Subsystems
3 Mechanism
This chapter describes how applications programs create and interact with a Stream using traditional and standardized STREAMS system calls. General system call and STREAMS-specific system calls provide the interface required by user level processes when implementing user level applications programs.
3.1 Mechanism Overview
The system call interface provided by STREAMS is upward compatible with the traditional character device system calls.
STREAMS devices appears as character device nodes within the file system in the
GNU/Linux system.
The open(2s) system call recognizes that a character special file is a STREAMS device,
creates a Stream and associates it with a device in the same fashion as a character device.
Once open, a user process can send and receive data to and from the STREAMS special file using
the traditional write(2s) and read(2s) system calls in the same manner as is
performed on a traditional character device special file.
Character device input-output controls using the ioctl(2s) system call can also be performed
on a STREAMS special file. STREAMS defines a set of standard input-output control
commands (see ioctl(2p) and streamio(7)) specific to STREAMS special files.
Input-output controls that a defined for a specific device are also supported as they are for
character device drivers.
With support for these general character device input and output system calls, it is possible to implement a STREAMS device driver in such a way that an application is unaware that it has opened and is controlling a STREAMS device driver: the application could treat the device in the identical manner to a character device. This make it possible to convert an existing character device driver to STREAMS and make possible the portability, migration, substitution and reuse benefits of the STREAMS framework.
STREAMS provides STREAMS-specific system calls and
ioctl(2s) commands, in
addition to support for the traditional character device I/O system calls and
ioctl(2s)
commands.
The poll(2s) system call15 provides the ability for the
application to poll multiple Streams for a wide range of events.
The putmsg(2s) and putpmsg(2s) system calls provide the ability for applications
programs to transfer both control and data information to the Stream. The
write(2s)
system call only supports the transfer of data to the Stream, whereas,
putmsg(2s) and
putpmsg(2s) permit the transfer of prioritized control information in addition to data.
The getmsg(2s) and getpmsg(2s) system calls provide the ability for applications
programs to receive both control and data information from the Stream. The
read(2s)
system call can only support the transfer of data (and in some cases the inline control
information), whereas,
getmsg(2s) and
getpmsg(2s) permit the transfer of
prioritized control information in addition to data.
Implementation of standardized service primitive interfaces is enabled through the use of the
putmsg(2s),
putpmsg(2s),
getmsg(2s) and
getpmsg(2s) system
calls.
STREAMS also provides kernel level utilities and facilities for the development of kernel resident STREAMS modules and drivers. Within the STREAMS framework, the Stream head is responsible for conversion between STREAMS messages passed up and down a Stream and the system call interface presented to user level applications programs. The Stream head is common to all STREAMS special files and the conversion between the system call interface and message passed on the Stream does not have to be reimplemented by the module and device driver writer as is the case for traditional character device I/O.
3.1.1 STREAMS System Calls
The STREAMS-related system calls are:
open(2s) | Open a STREAMS special file and create a new (or access an existing) Stream. |
close(2s) | Close a STREAMS special file and possibly cause the destruction of a Stream (i.e., on the last close of the Stream. |
read(2s) | Read data from an open Stream. |
write(2s) | Write data to an open Stream. |
ioctl(2s) | Control an open Stream. |
getmsg(2s),
getpmsg(2s) | Receive a (prioritized) message at the Stream head. |
putmsg(2s),
putpmsg(2s) | Send a (prioritized) message from the Stream head. |
poll(2s) | Receive notification when selected events occur on one or more Streams. |
pipe(2s) | Create a channel that provides a STREAMS-based bidirectional communication path between multiple processes. |
3.2 Stream Construction
STREAMS constructs a Stream as a double linked list of kernel data structures. Elements of the linked list are queue pairs that represent the instantiation of a Stream head, modules and drivers. Linear segments of link queue pairs can be connected to multiplexing drivers to form complex tree topologies. The branches of the tree are closest to the user level process and the roots of the tree are closest to the device driver.
The uppermost queue pair of a Stream represents the Stream head. The lowermost queue pair of a Stream represents the Stream end or device driver, pseudo-device driver, or another Stream head in the case of a STREAMS-based pipe.
The Stream head is responsible for conversion between a user level process using the system call interface and STREAMS messages passed up and down the Stream. The Stream head uses the same set of kernel routines available to module a driver writers to communicate with the Stream via the queue pair associated with the Stream head.
Figure 13 illustrates the queue pairs in the most basis of Streams: one consisting of a Stream head and a Stream end. Depicted are the upstream (read) and downstream (write) paths along the Stream. Of the uppermost queue pair illustrated, ‘H1’ is the upstream (read) half of the Stream head queue pair; ‘H2’, the downstream (write) half. Of the lowermost queue pair illustrated, ‘E2’ is the upstream half of the Stream end queue pair; ‘H1’ the downstream half.
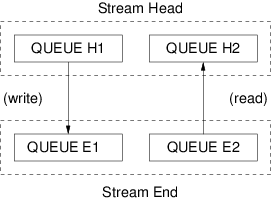
Each queue specifies an entry point (that is, a procedure) that will be used to process messages arriving at the queue. The procedures for queues ‘H1’ and ‘H2’ process messages sent to (or that arrive at) the Stream head. These procedures are defines by the STREAMS subsystem and are responsible for the interface between STREAMS related system calls and the Stream. The procedures for queues ‘E1’ and ‘E2’ process messages at the Stream end. These procedures are defined by the device driver, pseudo-device driver, or Stream head at the Stream end (tail). In accordance with the procedures defined for each queue, messages are processed by the queue and typically passed from queue to queue along the linked list segment.
Figure 14 details the data structures involved. The data structures are the queue(9),
qband(9), qinit(9), module_init and module_stat structures.
The queue(9) structure is the primary data structure associated with the queue. It
contains a double linked list (message queue) of messages contained on the queue. It also includes
pointers to other queues used in Stream linkage, queue state information and flags, and
pointers to the qband(9) and qinit(9) structures associated with the queue.
The qband(9) structure is used as an auxiliary structure to the queue(9)
structure that contains state information and pointers in to the message list for each priority band
within a queue (except for band ‘0’ information, which is contained in the queue(9)
structure itself). qband(9) structures are linked into a list and connected to the
queue(9) structure to which they belong.
The qinit(9) structure is defined by the module or driver and contains procedure pointers
for the procedures associated with the queue, as well as pointers to module or driver information
and initialization limits contained in the module_info(9) structure as well as an optional
pointer to a module_stat(9) structure that contains collected run-time statistics for the
entire module or driver. Normally, a separate qinit(9) structure exists for all of the
upstream and downstream instances of a queue associated with a driver or module.
The module_info(9) structure contains information about the module or driver, such as
module identifier and module name, as well as minimum and maximum packet size and queue flow control
high and low water marks. It is important to note that this structure is used only to initialize
the corresponding limit values for an instance of the queue(9) structure. The values
contained within a particular queue(9) structure can be changed in a running module or
driver without affecting the module_init(9) structure. The module_init(9)
structure is considered to be a read-only structure for the purpose of modules and drivers written
for STREAMS.
The module_stat(9) structure contains runtime counts of the entry into the various
procedures contained in the qinit(9) structure as well as a pointer to any module private
statistics that need to be collected. As depicted in Figure 14, there is normally only one
module_stat(9) structure per queue pair that collects statistics for the entire module or
driver. STREAMS does not peg this counts automatically and will not manipulate this
structure, even when one is attached. It is the responsibility of the module or driver writer to
peg counts as required. OpenSS7 does, however, provide some user level
administrative tools that can be used to examine the statistics contained in this structure. The
module_stat(9) structure is opaque to the STREAMS subsystem and can be read from or
written to by module or driver procedures.

Note that it is possible to have a separate qinit(9), module_init(9) and
module_stat(9) structure for each queue in the queue pair; however, typically there are
two qinit(9) structures and only one module_info and module_stat
structure per module or driver. qinit(9), module_info and module_stat
structures are statically allocated by the module or driver, and the queue(9) and
qband(9) structures are dynamically allocated by STREAMS on demand.
All of these queue related data structures are in Data Structures (and in the OpenSS7 Manual Pages).
Figure 14 illustrates two adjacent queue pairs with links between them in both directions on the
Stream. When a module is opened, STREAMS creates a queue pair for the module and then
links the the queue pair into the list. Each queue is linked to the next queue in the direction of
message flow. The q_next member of the queue(9) data structure is used to perform
the linkage. STREAMS allocates queue(9) structures in pairs (that is, as an array
containing two queue(9) structures). The read-side queue of the pair is the lower ordinal
and the write-side the higher. Nevertheless, STREAMS provides some utility functions (or
macros) that assist queue procedures in locating the other queue in the pair. The Stream head
and Stream end are known to procedures only a destinations toward which messages are
sent.16
There are two ways for the user level process to construct a Stream:
- Open a STREAMS device special file using the
open(2s)system call. Construction of a Stream with the open(2s) system call is detailed in Opening a STREAMS Device File and Opening a STREAMS-based FIFO and illustrated in Figure 15. - Create a STREAMS-based pipe using the
pipe(2s)system call. Construction of a Stream with the pipe(2s) system call is detailed in Creating a STREAMS-based Pipe and illustrated in Figure 16.
3.2.1 Opening a STREAMS Device File
A Stream is constructed when a STREAMS-based driver file is opened using the
open(2s) system call. A Stream constructed in this fashion is illustrated in
Figure 15.
In the traditional UNIX system, a STREAMS-based driver file is a character device special file within the UNIX file system. In the GNU/Linux system, under OpenSS7, a STREAMS-based driver file is either a character device special file within a GNU/Linux file system, or a character device special file within the mounted Shadow Special File System (specfs). When the specfs is mounted, specfs device nodes can be opened directly. When the specfs is not mounted, specfs device nodes can only be opened indirectly via character device nodes in a GNU/Linux file system external to the specfs.
All STREAMS drivers (and modules) have their entry points defined by the
streamtab(9) structure for that driver (or module). The streamtab structure has
the following format:
struct streamtab {
struct qinit *st_rdinit;
struct qinit *st_wrinit;
struct qinit *st_muxrinit;
struct qinit *st_muxwinit;
};
|
The streamtab structure defines a module or driver. st_rdinit points to the read
qinit structure for the driver and st_wrinit points to the driver’s write
qinit structure. For a multiplexing driver, the st_muxrinit and
st_muxwinit point to the qinit structures for the lower side of the multiplexing
driver. For a regular non-multiplexing driver these members are NULL.
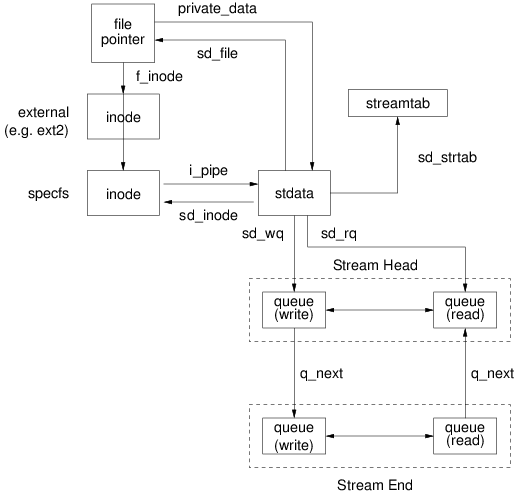
3.2.1.1 First Open of a Stream
When a STREAMS-based file is opened, a new Stream is created if one does not already
exists for the file, or if the D_CLONE flag is set for the file indicating that a new
Stream is to be created on each open of the file. First, a file descriptor is allocated in
the process’ file descriptor table, a file pointer is allocated to represent the opened file. The
file pointer is initialized to point to the inode associated with the character special file
in the external file system (see f_inode in Figure 15). This inode is of type
character special (S_IFCHR). The Linux kernel recognizes the inode as a
character special file and invokes the character device open routine in
OpenSS7. This inode is equivalent to the vnode used by
UNIX System V Release 4.2.
OpenSS7 uses the major and minor device numbers associated with the character
special file to locate an inode within the Shadow Special File System (specfs) that is
also provided by OpenSS7, and the f_inode pointer of the file
pointer is adjusted to point directly to this specfs inode. This specfs
inode is equivalent to the common snode used by UNIX System V Release 4.2.
Next, a Stream header is created from a stdata(9) data structure and a Stream
head is created from a pair of queue structures. The content of the stdata data
structure is initialized with predetermined STREAMS values applicable to all character special
Streams. The content of the queue data structures in the Stream head are
initialized with values from the streamtab structure statically defined for Stream
heads in the same manner as any STREAMS module or driver.
The inode within the specfs contains STREAMS file system dependent information.
This inode corresponds to the common snode of UNIX System V Release 4.2. The
sd_inode filed of the stdata structure is initialized to point to this inode.
The i_pipe filed of the inode data structure is initialized to point to the
Stream header (stdata structure), thus there is a forward and backward pointer between
the Stream header and the inode.
The private_data member of the file pointer is initialized to point to the
Stream header and the sd_file member of the stdata structure is initialized to
point to the file pointer.
After the Stream header and Stream head queue pair is allocated and initialized, a
queue structure pair is allocated and initialized for the driver. Each queue in the
queue pair has its q_init pointer initialized to the corresponding qinit structure
defined in the driver’s streamtab. Limit values in each queue in the pair are
initialized the queue’s module_init structure, now accessible via the q_init
pointer in the queue structure and the qi_minfo pointer in the qinit
structure.
The q_next pointers in each queue structure are set so that the Stream head
write queue points to the driver write queue and the driver read queue points to the Stream
head read queue. The q_next pointers at the ends of the Stream are set to
NULL. Finally, the driver open procedure (accessible via the qi_qopen member of
the qinit structure for the read-side queue) is called.
3.2.1.2 Subsequent Open of a Stream
When the Stream has already been created by a call to open(2s) and has not yet been
destroyed, that is, on a subsequent open of the Stream, and the STREAMS driver is not
marked for clone open with the D_CLONE flag in the cdevsw(9) structure, the
only actions performed are to call the driver’s open procedure and the open
procedures of all pushable modules present on the already existing Stream.
3.2.2 Opening a STREAMS-based FIFO
A STREAMS-based FIFO Stream is also constructed with a call to open(2s). A
Stream constructed in this fashion is illustrated in Figure 15b.
A STREAMS-based FIFO appears as a FIFO special file within a GNU/Linux file system, as a character special file within a GNU/Linux file system, or as a FIFO special file within the Shadow Special File System (specfs).17
Figure 15b illustrates an STREAMS-based FIFO that has been opened and a Stream created.
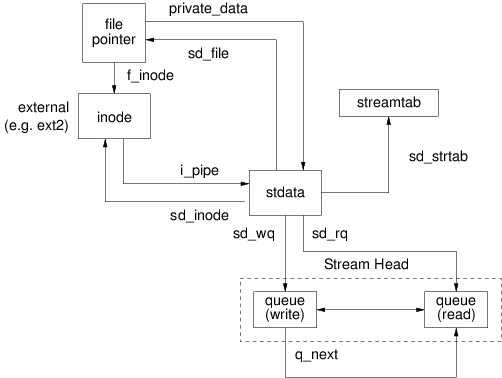
The sequence of events the cause the creation of a Stream when a STREAMS-based FIFO is
opened using the open(2s) system call are the same as that for regular STREAMS device
special files with the following differences:
- When the Stream header (
stdatastructure) is created, it is attached to the external GNU/Linux file systeminodeinstead of aninodewithin the Shadow Special File System (specfs). This is also true of thefilepointer: that is, thefilepointer refers to the external file systeminodeinstead of a specfsinode. The result is illustrated in Figure 15b. - The Stream header (
stdatastructure) is initialized with limits and values appropriate for a STREAMS-based FIFO rather than a regular STREAMS driver. This is because the behaviour of a STREAMS-based FIFO Stream head must be somewhat different from a regular STREAMS driver to be compliant with POSIX.18 - No driver queue pair is created or attached to the Stream. The Stream head write-side queue q_next pointer is set to the read-side queue as illustrated in Figure 15b.
Aside from these differences, opening a STREAMS-based FIFO is structurally equivalent to opening a regular STREAMS driver. The similarity makes it possible to also implement STREAMS-based FIFOs as character special files.
3.2.3 Creating a STREAMS-based Pipe
A Stream is also constructed when a STREAMS-based pipe is created using the
pipe(2s) system call.19 A
Stream constructed in this fashion is illustrated in Figure 16.
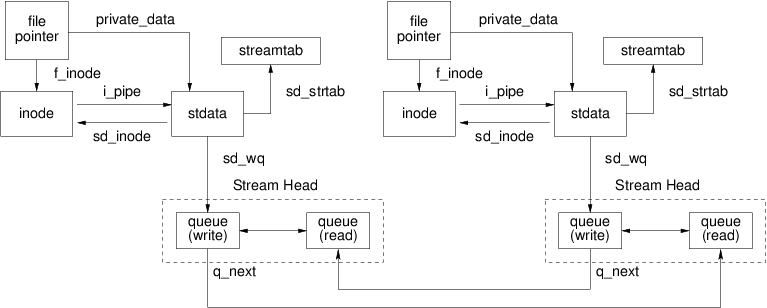
Pipes have no inode in an external GNU/Linux file system that can be opened with the
open(2s) system call and, therefore, they must be created with a call to
pipe(2s).20 When the pipe(2s) system call is
executed, two Streams are are created. The construction of each Stream is similar to
that when a STREAMS driver is opened with the following differences:
- Instead of creating one process file table entry and one
filepointer, as was the case for regular STREAMS drivers,pipe(2s)creates two file table entries (file descriptors) and twofilepointers, as shown in Figure 16. - Because a character special device is not being opened, there is no
inodein an external file system, so STREAMS allocated twoinodes from the specfs.21 Eachinodehas a file type ofS_IFIFO. Thefilepointer andstdatastructure for each Stream header is attached to one of theseinodes. - When the Stream header associated with each file descriptor is initialized, the
stdatastructure is initialized with values appropriate for a STREAMS-based pipe instead of a regular Stream.22 - Instead of creating a driver queue pair for the Stream, the q_next pointer for
the write-side
queueof each Stream head is initialized to point to the read-side queue of the other Stream head. This is illustrated in Figure 16.
3.2.4 Adding and Removing Modules
When a Stream has been constructed, modules can be inserted into the Stream between the Stream head and the Stream end (or between the Stream head and the midpoint of a STREAMS-based pipe or FIFO.) Addition (or pushing) of modules is accomplished by inserting the module into the Stream immediately below the Stream head. Removal (or popping) of modules is accomplished by deleting the module immediately below the Stream head from the Stream.
When a module is pushed onto a Stream, the module’s open procedure is called for the
newly inserted queue pair. When a module is popped from the Stream, the module’s
close procedure is called prior to deleting the queue pair from the Stream.
Modules are pushed onto an open Stream by issuing the I_PUSH(7) (see streamio(7)) ioctl(2s)
command on the file descriptor associated with the open Stream. Modules are popped from a
Stream with the I_POP(7) (see streamio(7)) ioctl(2s) command on the file descriptor associated
with the open Stream.
I_PUSH and I_POP allow a user level process to dynamically reconfigure the
ordering and type of modules on a Stream to meet any requirement.
3.2.4.1 Pushing Modules
When the Stream head receives an I_PUSH ioctl command, STREAMS
locates the module’s streamtab entry and creates a new queue pair to represent the instance
of the module. Each queue in the pair is initialized in a similar fashion as for drivers: the
q_init pointers are initialized to point to the qinit structures of the module’s
streamtab, and the limit values are initialized to the values found in the corresponding
module_init structures.
Next, STREAMS positions the module’s queue pair in the Stream immediately beneath the
Stream head and above the driver and all existing modules on the Stream. Then the
module’s open procedure is called for the queue pair. (The open procedure is
located in the qi_qopen member of the qinit structure associated with the read-side
queue.)
Each push of a module onto a Stream results in the insertion of a new queue pair representing a new instance of the module. If a module is (successfully) pushed twice on the same Stream, two queue pairs and two instances of the module will exist on the Stream.
To assist in identifying misbehaving applications programs that might push the same set of modules in an indefinite loop, swallowing an excessive amount of system resources, STREAMS imposes a limit on the number of modules that can be pushed on a given Stream to a practical number. The number is limited by the NSTRPUSH kernel parameter (see Configuration) which is set to either ‘16’ or ‘64’ on most systems.
Once an instance of a module is pushed on a Stream, its open procedure will be
called each time that the Stream is reopened.
3.2.4.2 Popping Modules
When the Stream head receives a I_POP ioctl command, STREAMS
locates the module directly beneath the Stream head and calls it’s close procedure.
(The close procedure is located by the qi_qclose member in the qinit
structure associated with the module instance’s read-side queue.) Once the close
procedure returns, STREAMS deletes the queue pair from the Stream and deallocates the
queue pair.
3.2.5 Closing the Stream
Relinquishing the last reference to a Stream dismantles the Stream and deallocates its
components. Normally, the last direct or indirect call to close(2s) for a Stream
results in the Stream being dismantled in this fashion.23 Calls to close(2s) before
the last close of a Stream will not result in the dismantling of the Stream and no
module or driver close procedure will be called on closes prior to the last close of a
Stream.
Dismantling a Stream consists of the following sequence of actions:
- If the Stream is a STREAMS-based pipe and the other end of the pipe is not open by
any process, but is named (i.e., mounted by
fattach(3)), then the named end of the pipe is detached as withfdetach(3)and then the Stream is dismantled. - If the Stream is a multiplexing driver, dismantling a Stream first consists of
unlinking any Streams that remain temporarily linked (by a previous
I_LINKcommand) under the multiplexing driver using the control stream being closed. Unlinking of temporary links consists of issuing anM_IOCTLmessage to the driver indicating theI_UNLINKoperation and entering an uninterrupted wait for an acknowledgement. Waiting for acknowledgement to theM_IOCTLcommand can cause the close to be delayed. If unlinking any temporary links results in the last reference being released to the now unlinked Stream, that Stream will be dismantled before proceeding. - Each module that is present on the Stream being dismantled will be popped from the
Stream by calling the module’s
closeprocedure and then deleting the module instance queue pair from the Stream. - If a driver exists on the Stream being dismantled, the driver’s
closeprocedure is called and then the Stream end queue pairs are deallocated.If the Stream invoking the chain of events that resulted in the dismantling of a Stream is open for blocking operation (neither
O_NDELAYnorO_NONBLOCKwere set), no signal is pending for the process causing dismantling of the Stream, and there are messages on the module or driver’s write-side queue, STREAMS may wait for an interval for the messages to drain before calling the module or driver’scloseprocedure. The maximum interval to wait is traditionally ‘15’ seconds. If any of these conditions are not met, the module or driver is closed immediately.When each module or driver queue pair is deallocated, any messages that remain on the queue are flushed prior to deallocation. Note that STREAMS frees only the messages contained on a message queue: any message or data structures used internally by the driver or module must be freed by the driver or module before it returns from its
closeprocedure. - The queue pair associated with the Stream head is closed24 and the queue pair and Stream header (
stdatastructure) are deallocated and the associatedinode,filepointer, and file descriptors are released.
3.2.6 Stream Construction Example
This Streams construction example builds on the previous example (see Listing 1.1 in Basic Streams Operations), by adding the pushing of a module onto the open Stream.
3.2.6.1 Inserting Modules
This example demonstrates the ability of STREAMS to push modules, not available with traditional character devices. The ability to push modules onto a Stream allows the independent processing an manipulation of data passing between the driver and user level process. This example is of a character conversion module is given a command and a string of characters by the user. Once this command is received, the character conversion module examines all character passing through it for an occurrence of the characters in the command string. When an instance of the string is discovered in the data path, the requested command action is performed on matching characters.
The declarations for the user program are shown in Listing 3.1.
As in the previous example of Listing 1.1, first a Stream is opened using the
open(2s) system call. In this example, the STREAMS device driver is
/dev/streams/comm/01.
Next, the character conversion module (named chconv) is pushed onto the open Stream
using the I_PUSH(7) (see streamio(7)) ioctl(2s) command.
The difference in creating an instance of a STREAMS driver and module are illustrated in
Listing 3.2 and Listing 3.3. An instance of a driver is created with the
open(2s) system call, and each driver requires at least one device node in a file system for
access. Naming of device nodes follow device naming conventions. On the other hand, an instance of
a module is created with the I_PUSH(7) (see streamio(7)) ioct(2) command. No file system device node
is required. Naming of modules is separate from any file system considerations, and are chosen by
the module writer. The only restrictions on a module name is that it be less than
FMNAMESZ in length, and that it be unique.
When successful, the I_PUSH(7) (see streamio(7)) ioctl(2s) call directs STREAMS to locate and
insert the STREAMS module named chconv onto the Stream. If the chconv
module has not been loaded into the Linux kernel, OpenSS7 will attempt
to demand load the kernel module named streams-chconv. Once the chconv STREAMS
module is loaded in the kernel, STREAMS will create a queue pair for the instance of the
module, insert it into the Stream beneath the Stream head, and call the module’s
open procedure. If the module’s open procedure returns an error (typically only
[ENXIO]), that error will be returned to the ioctl(2s) call. If the module’s
open procedure is successful, it (and the ioctl(2s) call), return ‘0’. The
resulting Stream configuration is illustrated in Figure 17.
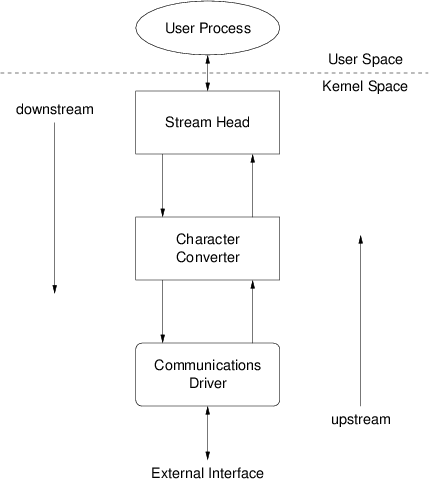
Modules are always pushed and popped from the position immediately beneath the Stream head in the manner of a push-down stack. This results in a Last-In-First-Out (LIFO) order of modules being pushed and popped. For example, if another module were to be pushed on the Stream illustrated in Figure 17, it would be placed between the Stream head and the Character Converter module.
3.2.6.2 Module and Driver Control
The next steps in this example are to pass control information to the module to tell it what command
to execute on which string of characters. A sequence that achieves this is shown in Listing 3.4. The sequence makes use of the I_STR(7) (see streamio(7)) ioctl(2s) command for STREAMS
special files.
There exist two methods for controlling modules and drivers using the ioctl(2s) system call:
- Transparent
-
In a transparent
ioctl(2s)call, the cmd argument to the call is the command issued to the module or device, and the arg argument is specific to the command and defined by the receiver of the command. This is the traditional method of controlling character devices and can also be supported by a STREAMS module and driver. - I_STR
-
In an
I_STRioctl(2s)call, the cmd argument to the call isI_STRand the arg argument of the call is a pointer to astrioctlstructure (defined in sys/stropts.h) describing the particulars of the call. This method is specific to STREAMS special files.It is this later method that illustrated in Listing 3.4.
The strioctl structure, defined in sys/stropts.h, has the following format:
struct strioctl {
int ic_cmd; /* ioctl request */
int ic_timout; /* ACK/NAK timeout */
int ic_len; /* length of data argument */
char *ic_dp; /* ptr to data argument */
};
|
| ic_cmd | identifies the command intended for a module or driver, |
| ic_timout | specifies the number of seconds an I_STR request should wait for an acknowledgement
before timing out, |
| ic_len | is the number of bytes of data to accompany the request, and |
| ic_dp | points to that data. |
In the Listing 3.4, two commands are issued to the character conversion module,
XCASE and DELETE.25
To issue the example XCASE command, ic_cmd is set to the command,
XCASE, and ic_dp and ic_len are set to the the string ‘AEIOU’.
Upon receiving this command, the example module will convert uppercase vowels to lowercase in the
data subsequently passing through the module. ic_timout is set to zero to indicated that
the default timeout (‘15’ seconds) should be used if no response is received.
To issue the example DELETE command, ic_cmd is set to the command,
DELETE, and ic_dp and ic_len are set to the the string ‘xX’. Upon
receiving this command, the example module will delete all occurrences of the characters ‘X’
and ‘x’ from data subsequently passing through the module. ic_timout is set to zero
to indicated that the default timeout (‘15’ seconds) should be used if no response is received.
Once issued, the Stream head takes an I_STR ioctl(2s) command and packages
its contents into a STREAMS message consisting of an M_IOCTL block and a M_DATA
block and passes it downstream to be considered by modules and drivers on the Stream. The
ic_cmd and ic_len values are stored in the M_IOCTL block and the data
described by ic_dp and ic_len are copied into the M_DATA block. Each
module, and ultimately the driver, examines the ioc_cmd filed in the M_IOCTL message
to see if the command is known to it. If the command is unknown to a module, it is passed
downstream for consideration by other modules on the Stream or for consideration by the
driver. If the command is unknown to a driver, it is negatively acknowledged and a error is
returned from the ioctl(2s) call.
The user level process calling ioctl(2s) with the I_STR(7) (see streamio(7)) command will block
awaiting an acknowledgement. The calling process will block up to ic_timout seconds
waiting for a response. If ic_timout is ‘0’, it indicates that the default timeout
value (typically ‘15’ seconds) should be used. If ic_timout is ‘-1’, it
indicates that an infinite timeout should be used. If the timeout occurs, the ioctl(2s)
command will fail with error [ETIME]. Only one process (thread) can be executing an
I_STR(7) (see streamio(7)) ioctl(2s) call on a given Stream at time. If an I_STR is
being executed when another process (or thread) issues an I_STR of its own, the process
(or thread) will block until the previous I_STR operation completes. However, the
process (or thread) will not block indefinitely if ic_timout is set to a finite timeout
value.
When successful, the I_STR command returns the value defined by the command operation
itself, and also returns any information to be returned in the area pointed to by ic_dp on
the call. The ic_len member is ignored for the purposes of returning data, and it is the
caller’s responsibility to ensure that the buffer pointed to by ic_dp is large enough to
hold the returned data.
3.2.6.3 Stream Dismantling with Modules
As shown in Listing 3.5, the remainder of this example follows the example in Listing 1.1 in Basic Streams Operations: data is read from the Stream and then echoed back to the Stream.
The exit(2) system call in Listing 3.5 will results in the dismantling of the
Stream as it is closed. However, in this example, when the Stream is closed with the
chconv module still present on the Stream, the module is automatically popped as the
Stream is dismantled.
Alternatively, it is possible to explicitly pop the module from the Stream using the
I_POP(7) (see streamio(7)) ioctl(2s) command. The I_POP command removes the module that
exists immediately below the Stream head. It is not necessary to specify the module to be
popped by name: whatever module exists just beneath the Stream head will be popped.
3.2.6.4 Stream Construction Example Summary
This example provided illustration of the ability of STREAMS to modify the behaviour of a
driver without the need to modify driver code. A STREAMS module was pushed that provided the
extended behaviour independent of the underlying driver. The I_PUSH and I_POP
commands used to push and pop STREAMS modules were also illustrated by the example.
Many other streamio(7) ioctl commands are available to the applications
programmer to manipulate and interrogate configuration and other characteristics of a Stream.
See streamio(7) for details.
4 Processing
Each module or driver queue pair has associated with it open close and
optionally admin procedures. These procedures are specified by the qi_qopen,
qi_qclose and qi_qadmin function pointers in the qinit(9) structure
associated with the read-side queue(9) of the queue pair. The open and
close procedures was the focus of previous chapters.
Each queue(9) in a module or driver queue pair has associated with it a put and
optional serivce procedure. These procedures are specified by the qi_putp and
qi_srvp function pointers in the qinit(9) structure associated with each
queue(9) in the queue pair. The put and sevice procedures are
responsible for the processing of messages the implementation of flow control, and are the focus of
this chapter.
4.1 Procedures
The put and service procedures associated with a given queue(9) in a
module queue pair are responsible for the processing of messages entering and leaving the queue.
Processing within these procedures is performed according to the message type of the message being
processed. Messages can be modified, queued, passed in either direction on a Stream, freed,
copied, duplicated, or otherwise manipulated. In processing for typical filter module, a resulting
message is normally passed along the Stream in the same direction it was travelling when it
was received.
A queue must always have a put procedure. The put procedure will be invoked
when messages are passed to the queue from an upstream or downstream module. A put
procedure will either process the message immediately, or place the message on its queue awaiting
later processing by the module or driver’s service procedure.
Optionally, a queue can also have an associated service procedure. The service
procedure is responsible for processing the backlog of any queued messages from the message queue.
With both a put and service procedure it is possible to tune performance of a
module or driver by performing actions required immediately from the put procedure while
performing actions that can be deferred from the service procedure. The service
procedure provides for the implementation of flow control and can also be used to promote bulk
processing of messages.
The put and particularly the service procedures are not directly associated with
any user level process. They are kernel level coroutines that normally run under the context of the
STREAMS scheduler kernel thread.26
4.1.1 Put Procedure
The put procedure is invoked whenever a message is passed to a queue. A message can be
passed to a queue using the put(9s), putnext(9), putctl(9),
putctl1(9), putctl2(9), putnextctl(9), putnextctl1(9),
putnextctl2(9), qreply(9) STREAMS utilities. The Stream head, modules
and drivers use these utilities to deliver messages to a queue.27 Invoking the put procedure of a queue with one
of these utilities is the only accepted way of passing a message to a queue.28
A queue’s put procedure is specified by the qi_putp member of the
qinit(9) structure associated with the queue(9). This is illustrated in
Figure 18a. In general, the read- and write-side queues of a module or driver have different
qinit(9) structures associated with them as there are differences in upstream and
downstream message processing; however, it is possible for read- and write-side queues to share the
same qinit(9) structure.
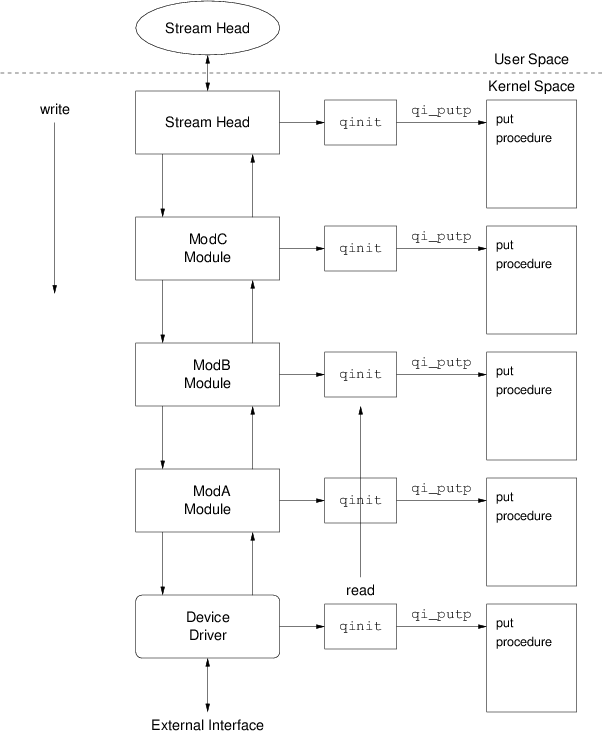
The put procedure processes a message immediately or places it onto the message queue for
later processing (generally by the service procedure). Because the put
procedure is invoked before any queueing takes place, it provides a processing point at which the
module or driver can take actions on time critical messages. put procedures are
executed a higher priority than service procedures. put procedures in the
upstream direction may even be executed with interrupts disabled.
As illustrated in Figure 18a, when a queue’s put procedure is invoked by an adjacent
queue’s put procedure (e.g. using putnext(9)), the qi_putp member of the
queue’s associated qinit(9) structure is invoked by STREAMS as subroutine call.
When a number of modules are present in a Stream, as illustrated in Figure 18a, each
successive direct invocation of a put procedure is nested inside the others. For example,
if the put procedure on the read-side of the driver is invoked by calling put(9s)
from the driver’s interrupt service routine, and then each successive put procedure calls
putnext(9), by the time that the message reaches the Stream head, the driver,
‘ModA’, ‘ModB’, ‘ModC’, and the Stream head put procedures will be
nested within another.
The advantage of this approach is that put processing is invoked sequentially and
immediately. A disadvantage of this approach is that, if there are additional stack frames nested
in each put procedure, the interrupt service routine stack limits can be exceeded, causing
a kernel crash. This is also the case for normal (non-ISR) operation and the kernel stack limits
might be exceeded if excessive nesting of put procedures occurs.29
The driver and module writers need to be cognisant of the fact that a limited stack might exist at
the time that the put procedure is invoked. However, STREAMS also provides the
service procedure as a way to defer processing to a ‘!in_irq()’ context.
4.1.2 Service Procedure
Each queue in module or driver queue pair can also have a service procedure associated
with it.
A queue’s service procedure is specified by the qi_srvp member of the
qinit(9) structure associated with the queue(9). If a queue does not have a
service procedure, the associated qi_srvp member is set to NULL. If
the queue has a service procedure, the associated qi_srvp member points to the
service procedure function. As with put procedures, in general, the read- and
write-side queues of a module or driver have different qinit(9) structure associated with
them as there are normally differences between the upstream and downstream message processing;
however, it is possible for read- and write-side queues to share the same qinit(9)
structure.
A queue’s service procedure is never invoked directly by an adjacent module or driver.
Adjacent modules or drivers invoke a queue’s put procedure. The put procedure
can then defer processing to the service procedure in a number of ways. The most direct
way that a put procedure can invoke a service procedure for a message is to
place that message on the message queue using putq(9). Once the message is placed on the
message queue in this manner, the put procedure can return, freeing the associated stack
frame. Also, placing a message on the message queue with putq(9) will normally result in
the queue’s service procedure being scheduled for later execution by the
STREAMS scheduler.
Note that the STREAMS scheduler is separate and distinct from the Linux scheduler. The
Linux scheduler is responsible for scheduling tasks, whereas the STREAMS scheduler is
only responsible for scheduling the execution of queue service procedures (and a few other
deferrable STREAMS housekeeping chores). The STREAMS scheduler executes pending queue
service procedures on a First-Come-First-Served (FCFS) basis. When a queue’s
service procedure is scheduled, its queue(9) structure is linked onto the tail
of the list of queues awaiting service procedure execution for the STREAMS
scheduler. When the STREAMS scheduler runs queues, each queue on the list is unlinked,
starting at the head of the list, and its service procedure executed.
To provide responsive scheduling of service procedures without necessarily requiring a task
switch (to the STREAMS kernel thread), the STREAMS scheduler is invoked and queue
service procedures executed within user context before returning to user level from any
STREAMS system call.
Processing of messages within a queue service procedure is performed by taking messages
off of the message queue and processing them in order. Because messages a queued on the message
queue with consideration to the priority class of the message, messages of higher priority are
processed by the service procedure first. However, providing that no other condition
impedes further processing of messages (e.g. flow control, inability to obtain a message block),
service procedures process all of the messages on the message queue available to them and
then return. Because service procedures are invoked by the STREAMS scheduler on a
FCFS basis, a priority message on a queue does not increase the scheduling priority of a
queue’s service procedure with respect to other queue service procedures: it
only affects the priority of processing one message on message queue with respect to other messages
on the queue. As a result, higher priority messages will experience a shorter processing latency
that lower priority messages.
In general, because drivers run at a software priority higher than the STREAMS scheduler,
drivers calling put(9s) can cause multiple messages to be queued for service before the
service procedure runs. On the other hand, because the STREAMS scheduler is always
invoked before return to user level at the end of a system call, it is unlikely that the Stream
head calling put(9s) will result in multiple messages being accumulated before the
corresponding service procedure runs.
4.1.3 Put and Service Procedure Summary
Processing of messages can be divided between put and service procedures to meet
the requirements for STREAMS processing, and to meet the demands of the module or driver.
Some message types might be processed entirely within the put procedure. Others might be
processed only with the service procedure. A third class of messages might have
processing split between put and service procedures. Processing of upstream and
downstream messages can be independent, giving consideration to the needs of each message flow. The
mechanism allows a flexible arrangement for the module and driver writer.
put and service procedures are addressed in more detail under Modules and Drivers. Design guidelines for put and service processing are given in
‘Design Guidlines’, ‘Module Design Guidlines’, and ‘Driver Design Guidlines’.
4.2 Asynchronous Example
5 Messages
5.1 Messages Overview
All communications between the Stream head, modules and drivers within the STREAMS
framework is based on message passing. Control and data information is passed along the
Stream as opposed to direct function calls between modules. Adjacent modules and driver are
invoked by passing pointers to messages to the target queue’s put procedure. This permits
processing to be deferred (i.e. to a service procedure) and to be subjected to flow
control and scheduling within the STREAMS framework.
At the Stream head, conversion between functional call based systems calls and the message oriented STREAMS framework is performed. Some system calls retrieve upstream messages or information about upstream messages at the Stream head queue pair, others create messages and pass them downstream from the Stream head.
At the Stream end (driver), conversion between device or pseudo-device actions and events and STREAMS messages is performed in a similar manner to that at the Stream head. Downstream control messages are consumed converted into corresponding device actions, device events generate appropriate control messages and the driver sends these upstream. Downstream messages containing data are transferred to the device, and data received from the device is converted to upstream data messages.
Within a linear segment from Stream head to Stream end, messages are modified, created, destroyed and passed along the Stream as required by each module in the Stream.
Messages consist of a 3-tuple of a message block structure (msgb(9)), a data block
structure (datab(9)) and a data buffer. The message block structure is used to provide an
instance of a reference to a data block and pointers into the data buffer. The data block structure
is used to provide information about the data buffer, such as message type, separate from the data
contained in the buffer. Messages are normally passed between STREAMS modules, drivers and
the Stream head using utilities that invoke the target module’s put procedure, such
as put(9s), putnext(9), qreply(9). Messages travel along a Stream
with successive invocations of each driver, module and Stream head’s
put procedure.
5.1.1 Message Types
Each data block (datab(9)) is assigned a message type. The message type discriminates the
use of the message by drivers, modules and the Stream head. Message types are defined in
sys/stream.h. Most of the message types may be assigned by a module or driver when it
generates a message, and the message type can be modified as a part of message processing. The
Stream head uses a wider set of message types to perform its function of converting the
functional interface to the user process into the messaging interface used by STREAMS modules
and drivers.
Most of the defined message types are solely for use within the STREAMS framework. A more
limited set of message types (M_PROTO, M_PCPROTO and M_DATA) can be used to pass
control and data information to and from the user process via the Stream head. These message
type can be generated and consumed using the read(2s), write(2s),
getmsg(2s), getpmsg(2s), putmsg(2s), putpmsg(2s) system calls and
some streamio(7) STREAMS ioctl(2s).
Below the message types are classified by queueing priority, direction of normal travel (downstream or upstream), and briefly described:
5.1.1.1 Ordinary Messages
Ordinary Messages (also called normal messages) are listed in the table below. Messages with a ‘D’ beside them can normally travel in the downstream direction; with a ‘U’, upstream. Messages with an ‘H’ beside them can be generated by the Stream head; an ‘M’, a module; an ‘E’, the Stream end or driver. Messages with an ‘h’ beside them are consumed and interpreted by the Stream head; an ‘m’, interpreted by a module; an ‘e’, consumed and interpreted by the Stream end or driver.
The following message types are defined by SVR 4.2:
M_DATA | D | U | HME | hme | User data message for I/O system calls |
M_PROTO | D | U | HME | hme | Protocol control information |
M_BREAK | D | - | ME | me | Request to a Stream driver to send a "break" |
M_PASSFP | - | U | H | h | File pointer passing message30 |
M_SIG | - | U | ME | h | Signal sent from a module/driver to a user |
M_DELAY | D | - | ME | me | Request a real-time delay on output |
M_CTL | D | U | ME | me | Control/status request used for inter-module communication |
M_IOCTL | D | - | H | me | Control/status request generated by a Stream head |
M_SETOPTS | - | U | ME | h | Set options at the Stream head, sent upstream |
M_RSE | D | U | ME | me | Reserved for internal use |
The following message types are not defined by SVR 4.2 and are OpenSS7 specific, or are specific to another SVR 4.2-based implementation:
M_EVENT | |||||
M_TRAIL | |||||
M_BACKWASH | AIX specific message for driver direct I/O. |
Ordinary messages are described in detail throughout this chapter and in Message Types.
5.1.1.2 High Priority Messages
High Priority Messages message are listed in the table below. Messages with a ‘D’ beside them can normally travel in the downstream direction; with a ‘U’, upstream. Messages with an ‘H’ beside them can be generated by the Stream head; an ‘M’, a module; an ‘E’, the Stream end or driver. Messages with an ‘h’ beside them are consumed and interpreted by the Stream head; an ‘m’, interpreted by a module; an ‘e’, consumed and interpreted by the Stream end or driver.
The following message types are defined by SVR 4.2:
M_IOCACK | - | U | ME | h | Positive ioctl(2s) acknowledgement |
M_IOCNAK | - | U | ME | h | Negative ioctl(2s) acknowledgement |
M_PCPROTO | D | U | HME | hme | Protocol control information |
M_PCSIG | - | U | ME | h | Signal sent from a module/driver to a user |
M_READ | D | - | H | me | Read notification, sent downstream |
M_FLUSH | D | U | HME | hme | Flush module queue |
M_STOP | D | - | ME | me | Suspend output |
M_START | D | - | ME | me | Restart stopped device output |
M_HANGUP | - | U | ME | h | Set a Stream head hangup condition, sent upstream |
M_ERROR | - | U | ME | h | Report downstream error condition, sent upstream |
M_COPYIN | - | U | ME | h | Copy in data for transparent31 ioctls, sent upstream |
M_COPYOUT | - | U | ME | h | Copy out data for transparent32 ioctls, sent upstream |
M_IOCDATA | D | - | H | me | Data for transparent33 ioctls, sent downstream |
M_PCRSE | D | U | ME | hme | Reserved for internal use |
M_STOPI | D | - | ME | me | Suspend input |
M_STARTI | D | - | ME | me | Restart stopped device input |
The following message types are not defined by SVR 4.2 and are OpenSS7 specific, or are specific to another SVR 4.2-based implementation:
M_PCCTL | D | U | ME | me | Same as M_CTL, but high priority. |
M_PCSETOPTS | - | U | ME | h | Same as M_SETOPTS, but high priority. |
M_PCEVENT | Same as M_EVENT, but high priority. | ||||
M_UNHANGUP | - | U | ME | h | Reverses a previous M_HANGUP message. |
M_NOTIFY | |||||
M_HPDATA | D | U | HME | hme | Same as M_DATA, but high priority. |
M_LETSPLAY | AIX specific message for driver direct I/O. | ||||
M_DONTPLAY | AIX specific message for driver direct I/O. | ||||
M_BACKDONE | AIX specific message for driver direct I/O. | ||||
M_PCTTY |
High Priority messages are described in detail throughout this chapter and in Message Types.
5.1.2 Expedited Data
5.2 Message Structure
STREAMS messages consist of a chain of one or more message blocks. A message block is a
triplet of a msgb(9) structure, a datab(9) structure, and a variable length data
buffer. A message block (msgb(9) structure) is an instance of a reference to the data
contained in the data buffer. Many message block structures can refer to a data block and data
buffer. A data block (datab(9) structure) contains information not contained in the data
buffer, but directly associated with the data buffer (e.g., the size of the data buffer). One and
only one data block is normally associated with each data buffer. Data buffers can be internal to
the message block, data block, data buffer triplet, automatically allocated using
kmem_alloc(9), or allocated by the module or driver and associated with a data block (i.e.,
using esballoc(9)).
The msgb(9) structure is defined in sys/stream.h and has the following format and
members:
typedef struct msgb {
struct msgb *b_next; /* next msgb on queue */
struct msgb *b_prev; /* prev msgb on queue */
struct msgb *b_cont; /* next msgb in message */
unsigned char *b_rptr; /* rd pointer into datab */
unsigned char *b_wptr; /* wr pointer into datab */
struct datab *b_datap; /* pointer to datab */
unsigned char b_band; /* band of this message */
unsigned char b_pad1; /* padding */
unsigned short b_flag; /* message flags */
long b_pad2; /* padding */
} mblk_t;
|
The members of the msgb(9) structure are described as follows:
| b_next | points to the next message block on a message queue; |
| b_prev | points to the previous message block on a message queue; |
| b_cont | points to the next message block in the same message chain; |
| b_rptr | points to the beginning of the data (the point from which to read); |
| b_wptr | Points to the end of the data (the point from which to write); |
| b_datap | points to the associated data block (datab(9)); |
| b_band | indicates the priority band; |
| b_pad1 | provides padding; and |
| b_flag | holds flags for this message block. Flags are normally set only on the first block of a message. Valid flags are discussed below. |
| b_pad2 | Reserved.34 |
The b_band member determines the priority band of the message. This member determines the
queueing priority (placement) in a message queue when the message type is an ordinary message
type. High priority message types are always queued ahead of ordinary message types, and the
b_band member is always set to ‘0’ whenever a high priority message is queued by a
STREAMS utility function. When allocb(9) or esballoc(9) are used to
allocate a message block, the b_band member is initially set to ‘0’. This member may
be modified by a module or driver.
Note that in System V Release 4.0, certain data structures fundamental to the kernel (for example, device numbers, user IDs) were enlarged to enable them to hold more information. This feature was referred to as Expanded Fundamental Types (EFT). Since some of this information was passed in STREAMS messages, there was a binary compatibility issue for pre-System V Release 4 drivers and modules.
#ifdef’s were added to the kernel to provide a transition period for these drivers and modules to be recompiled, and to allow it to be built to use the pre-System V Release 4 short data types or the System V Release 4 long data types. Support for short data types will be dropped in some future releases.35
The values that can be used in b_flag are exposed when sys/stream.h is included:
#define MSGMARK (1<<0) /* last byte of message is marked */
#define MSGNOLOOP (1<<1) /* don't loop mesage at stream head */
#define MSGDELIM (1<<2) /* message is delimited */
#define MSGNOGET (1<<3) /* UnixWare/Solaris/Mac OT/ UXP/V getq does not
return message */
#define MSGATTEN (1<<4) /* UXP/V attention to on read side */
#define MSGMARKNEXT (1<<4) /* Solaris */
#define MSGLOG (1<<4) /* UnixWare */
#define MSGNOTMARKNEXT (1<<5) /* Solaris */
#define MSGCOMPRESS (1<<8) /* OSF: compress like messages as space allows */
#define MSGNOTIFY (1<<9) /* OSF: notify when message consumed */
|
The following flags are defined by SVR 4.2:
MSGMARK | last byte of message is marked |
MSGNOLOOP | don’t loop message at Stream head |
MSGDELIM | message is delimited |
The following flags are not defined by SVR 4.2 and are OpenSS7 specific, or are specific to another SVR 4.2-based implementation:
MSGNOGET | UnixWare/Solaris/Mac OT/ UXP/V getq does not return message |
MSGATTEN | UXP/V attention to on read side |
MSGMARKNEXT | Solaris |
MSGLOG | UnixWare |
MSGNOTMARKNEXT | Solaris |
MSGCOMPRESS | OSF: compress like messages as space allows |
MSGNOTIFY | OSF: notify when message consumed |
typedef struct free_rtn {
void (*free_func) (caddr_t);
caddr_t free_arg;
} frtn_t;
typedef struct datab {
union {
struct datab *freep;
struct free_rtn *frtnp;
} db_f;
unsigned char *db_base;
unsigned char *db_lim;
unsigned char db_ref;
unsigned char db_type;
unsigned char db_class;
unsigned char db_pad;
unsigned int db_size;
#if 0
unsigned char db_cache[DB_CACHESIZE];
#endif
#if 0
unsigned char *db_msgaddr;
long db_filler;
#endif
/* Linux Fast-STREAMS specific members */
atomic_t db_users;
} dblk_t;
#define db_freep db_f.freep
#define db_frtnp db_f.frtnp
|
The following members are defined by SVR 4.2:
| db_freep | pointer to an external data buffer to be freed; |
| db_frtnp | pointer to an routine to free an extended buffer; |
| db_base | base of the buffer (first usable byte); |
| db_lim | limit of the buffer (last usable byte plus 1); |
| db_ref | number of references to this data block by message blocks; |
| db_type | the data block type (i.e., STREAMS message type); |
| db_class | the class of the message (normal or high priority); |
| db_iswhat | another name for db_class; |
| db_pad | padding; |
| db_filler2 | another name for db_pad; |
| db_size | size of the buffer; |
| db_cache | SVR 3.1 internal buffer;36 |
| db_msgaddr | pointer to msgb(9) structure allocated with this data block in a 3-tuple;37 |
| db_filler | filler; and,38 |
The following members are not defined by SVR 4.2 and are OpenSS7 specific:
| db_users | same as db_ref but atomic. |
5.2.1 Message Linkage
The message block (msgb(9) structure) provides an instance of a reference to the data
buffer associated with the message block. Multiple message blocks can be chained together (with
b_cont pointers) into a composite message. When multiple messages blocks are chained the
type of the first message block (its db_type) determines the type of the overall message.
For example, a message consisting of an M_IOCTL message block followed by an M_DATA
message block is considered to be an M_IOCTL message. Other message block members of the
first message block, such as b_band, also apply to the entire message. The initial message
block of a message block chain can be queued onto a message queue (with the b_next and
b_prev pointers). The chaining of message blocks into messages using the b_cont
pointer, and linkage onto message queues using the b_next and b_prev pointers, are
illustrated in Figure 21.
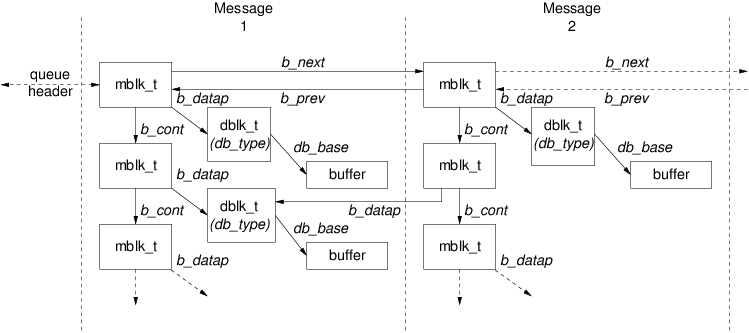
A message can occur stand-alone (that is, it is not present on any message queue as it is in a
module or driver’s put procedure) or can be queued on a message queue awaiting processing
by the queue’s service procedure. The b_next and b_prev pointers are
not significant for a stand-alone message and are initialized to NULL by STREAMS
when the message is not queued on a message queue.
A message block is an instance of a reference to a data block (and therefore data buffer). Multiple
message block can refer to the same data block. This is illustrated in Figure 21. In the figure,
the second message block of ‘Message 1’ shares a data block with the second message block of
‘Message 2’. Message blocks that share data blocks result from use of the dupb(9) and
dupmsg(9) STREAMS utilities. The first of these utilities, dupb(9), will
duplicate a message block, obtaining a new reference to the data block. The db_ref member
of the associated data block will be increased by one to indicate the number of message blocks that
refer to this data block. The second of these utilities, dupmsg(9) duplicate all of the
message blocks in a message, following the b_cont pointers, resulting in a duplicated
message.
Duplication of message blocks provides an excellent way of obtaining a new reference to a data buffer without the overhead of copying each byte of the buffer. A common use of duplication is to obtain a duplicate of a message to be held for retransmission, while another duplicate is passed to the next module for transmission.
Despite the advantages of duplication, copying a message block or message chain is also possible
with the copyb(9) and copymsg(9) STREAMS utilities. These utilities copy
the message block, data block, and data buffer for one message block (copyb(9)) or each
message block in a chain (copymsg(9)).
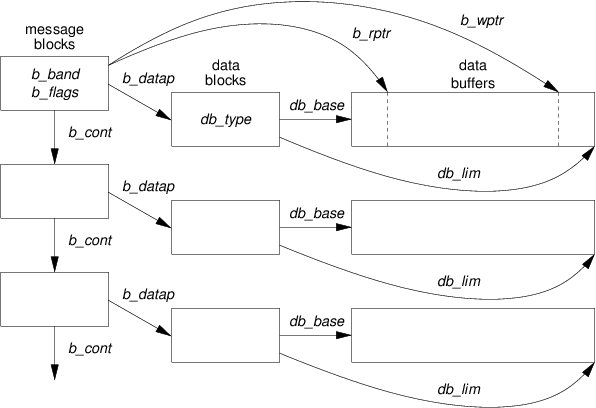
Being a reference to a data buffer, the message block has two pointer into the data buffer that define the range of data used by the reference. The b_rptr indicates the beginning of the range of data in the data buffer, and represents the position at which a module or driver would begin reading data; the b_wptr, the end of the range of data, where a module or driver would begin writing data. The data block, on the other hand, has two pointers representing the absolute limits of the data buffer. The db_base indicates the beginning of the data buffer; db_lim, the end. This relationship between pointers into the data buffer is illustrated in Figure 21b.
STREAMS provides a library of utility functions used to manipulate message blocks, data blocks and data buffers. The members of a message block or data block should not be manipulated directly by the module or driver write: an appropriate STREAMS message utility should be used instead. See Utilities.
5.2.2 Sending and Receiving Messages
As shown in the message lists of Messages Overview, a large subset of the available message types can be generated and consumed by modules and drivers. Another subset, are dedicated to generation and consumption by the Stream head.
Message types that are dedicated for passing control and data information between the Stream
and a user level process are the M_PROTO, M_PCPROTO, and M_DATA
messages.39
STREAMS-specific system calls are provided to user level processes so that they may exchange
M_PROTO, M_PCPROTO and M_DATA message with a Stream. This permits a user
level process to interact with the Stream in a similar fashion as a module on the
Stream, allowing user level processes to also present a service interface.40.
In general, all system calls interact directly (by subroutine interface) with the Stream head.
An exception is the open(2s) and close(2s) system calls which directly invoke a
subroutine call to the module or driver qi_qopen and qi_qclose procedures. All
other system calls call subroutines provided by the Stream header that can result in the
generation and transmission of a message on the Stream from the Stream head, or
consumption of a message at the Stream head.
The traditional write(2s) system call is capable of directly generating M_DATA
messages and having them passed downstream. The traditional read(2s) system call can
collect M_DATA messages (and in some read modes, M_PROTO and M_PCPROTO messages)
that have arrived at the Stream head. These system calls provide a backward compatible
interface for character device drivers implemented under STREAMS.41
The STREAMS-specific putmsg(2s), putpmsg(2s) system calls provide the user
level process with the ability to directly generate M_PROTO, M_PCPROTO or M_DATA
messages and have send downstream on the Stream from the Stream head.
getmsg(2s), getpmsg(2s) system calls provide the ability to collect M_PROTO,
M_PCPROTO and M_DATA messages from the Stream head. These system calls are
superior to the write(2s) and read(2s) system calls in that the provide a finer
control over the composition of the generated message, and more information concerning the
composition of a consumed message. Whereas, write(2s) and read(2s) pass only one
buffer from the user, putmsg(2s), putpmsg(2s), getmsg(2s),
getpmsg(2s) provide two buffers: one for the control part of the message to transfer
M_PROTO or M_PCPROTO message blocks with preservation of boundaries; another for the
data part, to transfer M_DATA messages blocks – all in a single call. Also, data transfer
with write(2s) and read(2s) are by nature byte-stream oriented, whereas, control and
data transfer with putmsg(2s) and getmsg(2s) are by nature message oriented.
write(2s) and read(2s) provide no mechanism for assigning priority to messages
generated or indicating the priority of messages to be received: putpmsg(2s) and
getpmsg(2s) provide the ability to specify criteria for the band (b_band) of the
generated or consumed message.
5.2.2.1 putmsg(2s)
putmsg(2s) provides the ability for a user level process to generate M_PROTO,
M_PCPROTO and M_DATA messages and have them send downstream on a Stream. The user
specifies a control part of the message that is used to fill the M_PROTO or M_PCPROTO
message block in the resulting message, and a data part of the message that is used to fill the
M_DATA message block in the resulting message.
The prototype for the putmsg(2s) system call is exposed by including the
sys/stropts.h system header file. The prototype for the putmsg(2s) system call is
as follows:
int putmsg(int fildes, const struct strbuf *ctlptr,
const struct strbuf *dataptr, int flags);
|
Where the arguments are interpreted as follows:
- fildes
specifies the Stream upon which to generate messages and is a file descriptor that was returned by the corresponding call to
open(2s)orpipe(2s)that created the Stream.- ctlptr
is a pointer to a read-only
strbuf(5)structure that is used to specify the control part of the message.- dataptr
is a pointer to a read-only
strbuf(5)structure that is used to specify the data part of the message.- flags
specifies whether the control part of the message is to be of type
M_PROTOor of typeM_PCPROTO. It can have values ‘0’ (specifying that anM_PROTOmessage be generated) or ‘RS_HIPRI’ (specifying that anM_PCPROTOmessage be generated).
The ctlptr and dataptr point to a strbuf(5) structure that is used to specify
the control and data parts of the message. The strbuf(5) structure has the format and
members as follows:
struct strbuf {
int maxlen; /* maximum buffer length */
int len; /* length of data */
char *buf; /* pointer to buffer */
};
|
The members of the strbuf(5) structure are interpreted by putmsg(2s) as follows:
| maxlen | specifies the maximum length of the buffer and is ignored by
putmsg(2s); |
| len | specifies the length of the data for transfer in the control or data part of the message; and, |
| buf | specifies the location of the data buffer containing the data for transfer in the control or data part of the message. |
If ctlptr is set to ‘NULL’ on call, or the len member of the strbuf(5)
structure pointed to by ctlptr is set to ‘-1’, then no control part (M_PROTO or
M_PCPROTO message block) will be placed in the resulting message.
If dataptr is set to ‘NULL’ on call, or the len member of the
strbuf(5) structure pointed to by dataptr is set to ‘-1’, then no data part
(M_DATA message block) will be placed in the resulting message.
For additional details, see the putmsg(2s) or putmsg(2p) reference page.
5.2.2.2 getmsg(2s)
getmsg(2s) provides the ability for a user level process to retrieve M_PROTO,
M_PCPROTO and M_DATA messages that have arrived at the Stream head. The user
specifies an area into which to receive any control part of the message (from M_PROTO or
M_PCPROTO message blocks in the message), and an area into which to receive any data part of
the message (from M_DATA message blocks in the message).
The prototype for the getmsg(2s) system call is exposed by including the
sys/stropts.h system header file. The prototype for the getmsg(2s) system call is
as follows:
int getmsg(int fildes, struct strbuf *ctlptr, struct strbuf *dataptr,
int *flagsp);
|
Where the arguments are interpreted as follows:
- fildes
specifies the Stream upon which to generate messages and is a file descriptor that was returned by the corresponding call to
open(2s)orpipe(2s)that created the Stream.- ctlptr
is a pointer to an
strbuf(5)structure that is used to specify the area to accept the control part of the message.- dataptr
is a pointer to an
strbuf(5)structure that is used to specify the area to accept the data part of the message.- flagsp
is a pointer to an integer flags word that is used both to specify the criteria for the type of message to be retrieved, on call, as well as indicating the type of the message retrieved, on return.
On call, the integer pointed to by flagsp can contain ‘0’ indicating that the first
available message is to be retrieved regardless of priority; or, ‘RS_HIPRI’, indicating that
only the first high priority message is to be retrieved and no low priority message.
On successful return, the integer pointed to by flagsp will contain ‘0’ to indicate that
the message retrieved was an ordinary message (M_PROTO or just M_DATA), or
‘RS_HIPRI’ to indicate that the message retrieved was of high priority (M_PCPROTO or just
M_HPDATA).
The members of the strbuf(5) structure are interpreted by getmsg(2s) as follows:
| maxlen | specifies the maximum length of the buffer into which the message part is to be written; |
| len | ignored by getmsg(2s) on call, but set on return to indicate the
length of the data that was actually written to the buffer by getmsg(2s); and, |
| buf | specifies the location of the data buffer to contain the data retrieved for the control or data part of the message. |
If ctlptr or dataptr are ‘NULL’ on call, or the maxlen field of the
corresponding strbuf(5) structure is set to ‘-1’, then getmsg(2s) will not
retrieve the corresponding control or data part of the message.
For additional details, see the getmsg(2s) or getmsg(2p) reference page.
5.2.2.3 putpmsg(2s)
putpmsg(2s) is similar to putmsg(2s), but provides the additional ability to
specify the queue priority band (b_band) of the resulting message. The prototype for the
putpmsg(2s) system call is exposed by including the sys/stropts.h system header
file. The prototype for the putpmsg(2s) system call is as follows:
int putpmsg(int fildes, const struct strbuf *ctlptr,
const struct strbuf *dataptr, int band, int flags);
|
The arguments to putpmsg(2s) are interpreted the same as those for putmsg(2s) as
described in putmsg(2s) with the exception of the band and flags arguments.
The band argument provides a band number to be placed in the b_band member of the first message block of the resulting message. band can only be non-zero if the message to be generated is a normal message.
The flags argument is interpreted differently by putpmsg(2s): it can have values
‘MSG_BAND’ or ‘MSG_HIPRI’, but these are equivalent to the ‘0’ and ‘RS_HIPRI’
flags for putmsg(2s).
Under OpenSS7,
putmsg(2s) is implemented as a library call to putpmsg(2s). This is possible
because the call:
putmsg(fildes, ctlptr, dataptr, flags);
is equivalent to:
putpmsg(fildes, ctlptr, dataptr, 0, flags);
For additional details, see the putpmsg(2s) or putpmsg(2p) reference page.
5.2.2.4 getpmsg(2s)
getpmsg(2s) is similar to getmsg(2s), but provides the additional ability to
specify the queue priority band (b_band) of the retrieved message. The prototype for the
getpmsg(2s) system call is exposed by including the sys/stropts.h system header
file. The prototype for the getpmsg(2s) system call is as follows:
int getpmsg(int fildes, struct strbuf *ctlptr, struct strbuf *dataptr,
int *bandp, int *flagsp);
|
The arguments to getpmsg(2s) are interpreted the same as those for getmsg(2s) as
described in getmsg(2s), with the exception of the bandp and flags arguments.
The bandp argument points to a band number on call that specifies a criteria for use with selecting the band of the retrieved message and returns the band number of the retrieved message upon successful return. The integer pointed to by bandp can take on values as follows:
MSG_ANYOnly specified on call. Specifies that the first available message is to be retrieved, regardless of priority or band.
MSG_BANDOn call, specifies that an orinary message of message band bandp or greater is to be retrieved. On return, indicates that an ordinary message was retrieved of the band returned in bandp.
MSG_HIPRIOn call, specifies that a high priority message is to be retrieved. On return, indicates that a high priority message was retrieved.
On call, bandp is ignored unless flagsp specifies ‘MSG_BAND’. When ‘MSG_BAND’ is specified, bandp specifies the minimum band number of the message to be retrieved. On return, bandp indicates the band number (b_band) of the retrieved message, or ‘0’ if the retrieved message was a high priority message.
Under OpenSS7,
getmsg(2s) is implemented as a library call to getpmsg(2s). This is possible
because the calls:
int flags = 0; getmsg(fildes, ctlptr, dataptr, &flags); int flags = RS_HIPRI; getmsg(fildes, ctlptr, dataptr, &flags);
are equivalent to:
int band = 0; int flags = MSG_ANY; getpmsg(fildes, ctlptr, dataptr, &band, &flags); int band = 0; int flags = MSG_HIPRI; getpmsg(fildes, ctlptr, dataptr, &band, &flags);
For additional details, see the getpmsg(2s) or getpmsg(2p) reference page.
5.2.3 Control of Stream Head Processing
Stream head message processing can be controlled by the user level process, or by a module or driver within the Stream.
Modules and drivers can control Stream head processing using the M_SETOPTS message. At
any time, a module or driver can issue an M_SETOPTS message upstream. The M_SETOPTS
contains a stroptions(9) structure (see Data Structures) specifying which Stream
head characteristics to alter in the read-side queue of the Stream head (including
q_hiwat, qi_lowat, q_minpsz and q_maxpsz), however, of interest
to the current discussion are the read and write options associated with the Stream head.
User level processes can also alter the read and write options associated with the Stream
head. User level processes use the I_SRDOPT(7) (see streamio(7)), I_GRDOPT(7) (see streamio(7)), I_SWROPT(7) (see streamio(7))
and I_GWROPT(7) (see streamio(7)) ioctl(2s) commands to achieve the same purpose as the
M_SETOPTS message used by modules and drivers.
5.2.3.1 Read Options
Read options are altered by a user level process using the I_SRDOPT(7) (see streamio(7)) and
I_GRDOPT(7) (see streamio(7)) ioctl(2s) commands; or altered by a module or driver using the
SO_READOPT flag and so_readopt member of the stroptions(9) data
structure contained in an M_SETOPTS message passed upstream.
Two flags, each selected from two sets of flags, can be set in this manner. The two sets of flags are as follows:
5.2.3.2 Read Mode
The read mode affects how the read(2s) and readv(2s) system calls treat message
boundaries. One read mode can be selected from the following modes:
RNORMbyte-stream mode. This is the default read mode. This is the normal byte-stream mode where message boundaries are ignored.
read(2s)andreadv(2s)return data until the read count has been satisfied or a zero length message is received.RMSGDmessage non-discard mode. The
read(2s)andreadv(2s)system calls will return when either the count is satisfied, a zero length message is received, or a message boundary is encountered. If there is any data left in a message after the read count has been satisfied, the message is placed back on the Stream head read queue. The data will be read on a subsequentread(2s)orreadv(2s)call.RMSGNmessage discard mode. Similar to
RMSGNmode, above, but data that remains in a message after the read count has been satisfied is discarded.RFILLmessage fill mode. Similar to
RNORMbut requests that the Stream head fill a buffer completely before returning to the application. This is used in conjunction with a cooperating module andM_READmessages.42
5.2.3.3 Read Protocol
The read protocol affects hos read(2s) and readv(2s) system calls treat the control
part of a message. One read protocol can be selected from the following protocols:43
RPROTNORMfail read when control part present. Fail
read(2s)with[EBADMSG]if a message containing a control part is at the front of the Stream head read queue. Otherwise, the message wi read as normal. This is the default setting for new Stream heads.44RPROTDATdeliver control part of a message as data. The control part of a message is prepended to the data part and delivered.45
RPROTDISdiscard control part of message, delivering only any data part. The control part of the message is discarded and the data part is processed.46
RPROTCOMPRESScompress like data.47
Note that, although all modes terminate the read on a zero-length message, POSIX requires
that zero only be returned from read(2s) when the requested length is zero or an end of file
(M_HANGUP) has occurred. Therefore, OpenSS7 only returns on a
zero-length message if some data has been read already.
5.2.3.4 Write Options
No mechanism is provided to permit a write(2s) system call to generate either a
M_PROTO or M_PCPROTO message. The write(2s) system call will only generate one
or more M_DATA messages.
Write options are altered by a user level process using the I_SWROPT(7) (see streamio(7)) and
I_GWROPT(7) (see streamio(7)) ioctl(2s) commands. It is not possible for a module or driver to affect
these options with the M_SETOPTS message.
SNDZEROPermits the sending of a zero-length message downstream when a
write(2s)of zero length is issued. Without this option being set,write(2s)will succeed and return ‘0’ if a zero-lenthwrite(2s)is issued, but no zero-length message will be generated or sent. This option is the default for regular Stream, but is not set by default for STREAMS-based pipes.SNDPIPEIssues a {
SIGPIPE} signal to caller ofwrite(2s)if the caller attempts to write to a Stream that has received a hangup (M_HANGUP) or an error (M_ERROR). When not set, {SIGPIPE} will not be signalled. This option is the default for STEAMS-based pipes but is not set by default for regular Streams.SNDHOLDRequests that the Stream head hold messages temporarily in an attempt to coalesce smaller messages into larger ones for efficiency. This feature is largely deprecated, but is supported by OpenSS7. When not set (as is the default), messages are sent immediately. This option is not set by default for any Stream.
5.2.3.5 Write Offset
A write offset is provided as a option to allow for reservation of bytes at the beginning of the
M_DATA message resulting from a call to the write(2s) system call.
The write offset can be altered by a module or driver using the SO_WROFF flag and
so_wroff member of the stroptions(9) data structure contained in an
M_SETOPTS message passed upstream. It is not possible for a user level process to alter the
write offset using any streamio(7) command.
The write offset associated with a Stream head determines the amount of space that the
Stream head will attempt to reserve at the beginning of the initial M_DATA message
generated in response to the write(2s) system call. The purpose of a write offset is to
permit modules and drivers to request that bytes at the beginning of a downstream messages be
reserved to permit, for example, the addition of protocol headers to the message as it passes
without the need to allocate additional message blocks and prepend them.
The write offset, however, is advisory to the Stream head and if it cannot include the offset,
a M_DATA message with no offset may still be generated. It is the responsibility of the
module or driver to ensure that sufficient bytes are reserved at the start of a message before
attempting to use them.
5.3 Queues and Priority
Each queue in a Stream has associated with it a message queue that consists of a double linked
list of message blocks. Messages are normally placed onto a message queue by the queue’s
put procedure, and removed by the service procedure. Messages will accumulate
in the message queue whenever the rate at which messages are place onto the message queue by the
put procedure exceeds the rate at which they are removed by the service
procedure. The service procedure can become blocked for a number of reasons: the
STREAMS scheduler is delayed in invoking the service procedure due to higher
priority system tasks; the service procedure is awaiting a message block necessary to
complete its processing of a message; the service procedure is blocked by flow control
forward in the Stream.
When a queue service procedure runs, it take messages off of the message queue from the
head of the message queue in the order in which they appear in the queue. Messages are queued
according to their priority: high priority messages appear first, followed by priority messages of
descending band number, followed by normal messages in band zero. Within a band, messages are
processed in the order in which they arrived at the queue (that is, on a First-In-First-Out
(FIFO) basis). High priority messages are also processed in the order in which they arrived at the
queue. This ordering within the queue is illustrated in Figure 22.

When a message is placed on a queue, (e.g., by putq(9)), it is placed on the queue behind
messages of the same priority. High priority messages are not subjected to flow control. Priority
messages will affect the flow control parameters in the qband(9) structure associated with
the band. Normal messages will affect the flow control parameter in the queue(9)
structure. Message priority range from ‘0’ to ‘255’, where ‘0’ is the lowest
queueing priority and ‘255’ the highest. High priority messages are considered to be of
greater priority than all other messages.
Bands can be used for any purpose required by a service interface. For example, simple Expedited Data implementation can be accomplished by using one band in addition to normal messages, band ‘1’. This is illustrated in Figure 23.
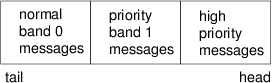
High priority messages are considered to be of greatest priority and are not subjected to flow
control. High priority messages are a rare occurrence on the typical Stream, and the
Stream head only permits one high priority message (M_PCPROTO) to be outstanding for a
user. If a high priority message arrives at the Stream head and one is already waiting to be
read by the user, the message is discarded. High priority messages are typically handled directly
from a queue’s put procedure, but they may also be queued to the message queue. When
queue, a high priority message will always cause the service procedure of the queue (if
any) to be scheduled for execution by the STREAMS scheduler. When a service
procedure runs, and a message is retrieved from the message queue (e.g., with getq(9)),
high priority messages will always be retrieved first. High priority messages must be acted upon
immediately by a service procedure, it is not possible to place a high priority message
back on a queue with putbq(9).
5.3.1 Queue Priority Utilities
The following STREAMS utilities are provided to module and driver writers for use in
put and service procedures. These utilities assist with handling flow control
within a Stream.
flushq(9)flushband(9)These utilities provide the ability to flush specific messages from a message queue. They are discussed under Flush Handling, and under Utilities. These utilities are also described in the corresponding manual page.
canput(9)bcanput(9)canputnext(9)bcanputnext(9)These utilities provide the ability to test the current or next queue for a flow control condition for normal (band zero) messages or priority messages within a message band. They are discussed under Flow Control, and under Utilities. These utilities are also described in the corresponding manual page.
strqset(9)strqget(9)These utilities provide the ability to examine and modify flow control parameters associated with a queue (
queue(9)) or queue band (qband(9)). They are discussed below, and under Utilities. These utilities are also described in the corresponding manual page.
The strqget(9) and strqset(9) STREAMS utilities are provided to access and
modify members of the queue(9) and qband(9) data structures. In general, the
specific members of these data structures should not be access directly by the module writer. This
restriction is necessary for several reasons:
- The size and format of the
queue(9)andqband(9)structures might change, breaking binary modules compiled against the older definitions.strqget(9)andstrqset(9)provide structure independent access to these members. - On Symetric Multi-Processing (SMP) architectures, it may be necessary to protect access
to a member of these structures to guarantee atomicity of operations.
strqget(9)andstrqset(9)provide necessary locking on SMP architectures.
5.3.1.1 strqget(9)
A declaration for the strqget(9) utility is exposed by including the sys/stream.h
kernel header file. The prototype is as follows:
int strqget(queue_t *q, qfields_t what, unsigned char band, long *val); |
Where the arguments are interpreted as follows:
- q
Specifies the
queue(9)structure (and indirectly theqband(9)structure) from which to retrieve a member.- what
Specifies which member to retrieve. Specific values for various members are described below.
- band
When zero, specifies that the member is to be retrieved from the
queue(9)structure specified by q; when non-zero, the band number of theqband(9)structure from which to retrieve the member.- val
Points to a
longvalue into which the result is to be placed. All results are converted to alongbefore being written to this location.
The qfields_t(9) enumeration is defined as follows:
typedef enum qfields {
QHIWAT, /* hi water mark */
QLOWAT, /* lo water mark */
QMAXPSZ, /* max packet size */
QMINPSZ, /* min packet size */
QCOUNT, /* count */
QFIRST, /* first message in queue */
QLAST, /* last message in queue */
QFLAG, /* state */
QBAD, /* last (AIX and SUPER-UX) */
} qfields_t;
|
Each value of the qfields_t enumeration specifies a different member to be set by
strqset(9) or retrieved by strqget(9). When band is zero, the member to be
set or retrieved is the corresponding member of the queue(9) structure indicated by
q. When band is non-zero, the member to be set or retrieved is the corresponding member
of the qband(9) structure, associated with q, of band number band.
QHIWAT | Set or return the high water mark (q_hiwat or qb_hiwat). |
QLOWAT | Set or return the low water mark (q_lowat or qb_lowat). |
QMAXPSZ | Set or return the maximum packet size (q_maxpsz or qb_maxpsz). |
QMINPSZ | Set or return the minimum packet size (q_minpsz or qb_minpsz). |
QCOUNT | Return the count of bytes queued (q_count or qb_count).
This field is only valid for strqget(9). |
QFIRST | Return a pointer to the first message queued (q_first or qb_first).
This field is only valid for strqget(9). |
QLAST | Return a pointer to the last message queued (q_last or qb_last).
This field is only valid for strqget(9). |
QFLAG | Return the flags word (q_flag or qb_flag).
This field is only valid for strqget(9). |
Additional information is given under Utilities, and provided in the strqget(9)
manual page.
5.3.1.2 strqset(9)
A declaration for the strqset(9) utility is exposed by including the sys/stream.h
kernel header file. The prototype is as follows:
int strqset(queue_t *q, qfields_t what, unsigned char band, long val); |
Where the arguments are interpreted as follows:
- q
Specifies the
queue(9)structure (and indirectly theqband(9)structure) to which to write a member.- what
Specifies which member to write. Specific values for various members are described above under strqget(9).
- band
When zero, specifies that the member is to be written to the
queue(9)structure specified by q; when non-zero, the band number of theqband(9)structure to which to write the member.- val
Specifies the
longvalue to write to the member. All values are converted to alongto be passed in this argument.
Additional information is given under Utilities, and provided in the strqset(9)
manual page.
5.3.2 Queue Priority Commands
Aside from the putpmsg(2s) and getpmsg(2s) system calls, a number of
streamio(7) commands associated with queueing and priorities can be issued by a user level
process using the ioctl(2s) system call. The input output controls that accept a queue
band or indicate a queue band event are as follows:
I_FLUSHBAND(7) (see streamio(7))Flushes the Stream for a specified band. This
ioctl(2s)command is equivalent to theflushq(9)andflushband(9)utilities available to modules and drivers. It is discussed under Flush Handling.I_CKBAND(7) (see streamio(7))Checks whether a message is available to be read from a specified queue band. It is discussed below.
I_GETBAND(7) (see streamio(7))Gets the priority band associated with the next message on the Stream head read queue. It is discussed below.
I_CANPUT(7) (see streamio(7))Checks whether messages can be written to a specified queue band. This
ioctl(2s)command is equivalent to thecanput(9)andbcanput(9)utilities available to modules and drivers. It is discussed under Flow Control.I_ATMARK(7) (see streamio(7))This
ioctl(2s)command supports Transmission Control Protocol (TCP) urgent data in a byte-stream. It indicates when a marked message has arrived at the Stream head. It is discussed below.I_GETSIG(7) (see streamio(7))I_SETSIG(7) (see streamio(7))Sets the mask of events for which the Stream head will send a calling process a {
SIGPOLL} or {SIGURG} signal. Events includeS_RDBAND,S_WRBANDandS_BANDURG. Thisioctl(2s)command is discussed under Input and Output Polling.
The streamio(7) input output controls in the following sections are all of the form:
int ioctl(int fildes, int cmd, long arg); |
5.3.2.1 I_FLUSHBAND
Flushes the Stream for a specified band.
This ioctl(2s) command is equivalent to the flushq(9) and flushband(9)
utilities available to modules and drivers. It is discussed under Flush Handling.
| fildes | the Stream for which the command is issued; |
| cmd | is ‘I_FLUSHBAND’; and, |
| arg | is a pointer to a bandinfo(9) structure. |
The bandinfo(9) structure is exposed by including the sys/stropts.h system header
file. Its format and members are as follows:
struct bandinfo {
unsigned char bi_pri;
int bi_flag;
};
|
where,
| bi_pri | the priority band to flush; |
| bi_flag | how to flush: one of FLUSHR, FLUSHW or FLUSHRW. |
5.3.2.2 I_CKBAND
Checks whether a message is available to be read from a specified queue band.
| fildes | the Stream for which the command is issued; |
| cmd | is ‘I_CKBAND’. |
| arg | contains the band number for which to check for an available message. |
5.3.2.3 I_GETBAND
Gets the priority band associated with the next message on the Stream head read queue.
| fildes | the Stream for which the command is issued; |
| cmd | is ‘I_GETBAND’. |
| arg | is a pointer to an int into which to receive the band number. |
5.3.2.4 I_CANPUT
The I_CANPUT(7) (see streamio(7)) ioctl(2s) command has the following form:
int ioctl(int fildes, int cmd, long arg); |
where,
| fildes | the Stream for which the command is issued; |
| cmd | is ‘I_CANPUT’. |
| arg | contains the band number for which to check for flow control. |
Checks whether message can be written to the queue band specified by arg. arg is an integer which contains the queue band to test for flow control. arg can also have the following value:
ANYBANDWhen this value is specified, instead of testing a specified band,
I_CANPUT(7) (see streamio(7))tests whether any (existing) band is writable.
Upon success, the I_CANPUT(7) (see streamio(7)) ioctl(2s) command returns zero (‘0’) or a
positive integer. The I_CANPUT(7) (see streamio(7)) command returns false (‘0’) if the band cannot be
written to (due to flow control), and returns true (‘1’) if the band is writable. Upon
failure, the ioctl(2s) call returns ‘-1’ and sets errno(3) to an appropriate
error number.
When the I_CANPUT(7) (see streamio(7)) ioctl(2s) command fails, it returns ‘-1’ and sets
errno(3) to one of the following errors:
[EINVAL]arg is outside the range ‘0’ to ‘255’ and does not represent a valid priority band, or is not
ANYBAND.[EIO]fildes refers to a Stream that is closing.
[ENXIO]fildes refers to a Stream that has received a hangup.
[EPIPE]fildes refers to a STREAMS-based pipe and the other end of the pipe is closed.
[ESTRPIPE]fildes refers to a STREAMS-based pipe and a write operation was attempted with no readers at the other end, or a read operation was attempted, the pipe is empty, and there are no readers writers the other end.
[EINVAL]fildes refers to a Stream that is linked under a multiplexing driver. If a Stream is linked under a multiplexing driver, all
ioctl(2s)commands other thanI_UNLINK(7) (see streamio(7))orI_PUNLINK(7) (see streamio(7))will return[EINVAL].
Any error received in an M_ERROR message indicating a persistent write error for the
Stream will cause I_CANPUT(7) (see streamio(7)) to fail, and the write error will be returned in
errno(3).
Any error number returned in errno(3) in response to a general ioctl(2s) failure
can also be returned in response to I_ATMARK(7) (see streamio(7)). See also ioctl(2p).
OpenSS7 implements the special flag, ANYBAND, that can be used for
an arg value instead of the band number to check whether any existing band is writable. This
is similar to the POLLWRBAND flag to poll(2s). ANYBAND uses the
otherwise invalid band number ‘-1’. Portable STREAMS applications programs will not use
the ANYBAND flag and will not rely upon I_CANPUT(7) (see streamio(7)) to generate an error if
passed ‘-1’ as an invalid argument.
5.3.2.5 I_ATMARK
The I_ATMARK(7) (see streamio(7)) ioctl(2s) command has the following form:
int ioctl(int fildes, int cmd, long arg); |
where,
| fildes | the Stream for which the command is issued; |
| cmd | is ‘I_ATMARK’. |
| arg | specifies a criteria for checking for a mark. |
The I_ATMARK(7) (see streamio(7)) command informs the user if the current message on the Stream head
read queue is marked by a downstream module or driver. The arg argument determines how the
checking is done when there are multiple marked messages on the Stream head read queue. The
possible values of the arg argument are as follows:
ANYMARKDetermine if the message at the head of the Stream head read queue is marked by a downstream module or driver.
LASTMARKDetermine if the message at the head of the Stream head read queue is the last message that is marked on the queue by a downstream module or driver.
The bitwise inclusive OR of the flags ANYMARK and LASTMARK is
permitted.
STREAMS message blocks that have the MSGMARK flag set in the b_flag member
of the msgb(9) structure are marked messages. Solaris also provides the
MSGMARKNET and MSGNOTMARKNET flags. The use of these flags is not very clear,
but OpenSS7 could use them in the read(2s) logic to determine whether
the next message is marked without removing the message from the queue.
When read(2s) encounters a marked message and data has already been read, the read
terminates with the amount of data read. The resulting short read is an indication to the user that
a marked message could exist on the read queue. (Short reads can also result from zero-byte data,
or from a delimited message: one with the MSGDELIM flag set in b_flag). When a
short read occurs, the user should test for a marked message using the ANYMARK flag to
the I_ATMARK(7) (see streamio(7)) ioctl(2s) command. A subsequent read(2s) will consume the
marked message following the marked message. This can be checked by using the LASTMARK
flag to the I_ATMARK(7) (see streamio(7)) ioctl(2s) command.
The b_flag member of the msgb(9) structure can have the flag, MSGMARK,
set that allows a module or driver to mark a message sent to the Stream head. This is used to
support tcp(4)’s ability to indicate the last bye of out-of-band data. Once marked, a
message sent to the Stream head causes the Stream head to remember the message. A user
may check to see if the message on the front of the Stream head read queue is marked, and
whether it is the last marked message on the queue, with the I_ATMARK(7) (see streamio(7)) ioctl(2s)
command. If a user is reading data from the Stream head and there are multiple messages on
the Stream head read queue, and one of those messages is marked, read(2s) terminates
when it reaches the marked message and returns the data only up to that marked message. The rest of
the data may be obtained with successive reads. ANYMARK indicates that the user merely
wants to check if the message at the head of the Stream head read queue is marked.
LASTMARK indicates that the user wants to see if the message is the only one marked on
the queue.
Upon success, the I_ATMARK(7) (see streamio(7)) ioctl(2s) command returns zero (‘0’) or a
positive integer. The I_ATMARK(7) (see streamio(7)) operation returns a value of true (‘1’) if the
marking criteria is met. It returns false (‘0’) if the marking criteria is not met. Upon
failure, the I_ATMARK(7) (see streamio(7)) ioctl(2s) command returns ‘-1’ and sets
errno(3) to an appropriate error number.
When the I_ATMARK(7) (see streamio(7)) ioctl(2s) command fails, it returns ‘-1’ and sets
errno(3) to one of the following errors:
[EINVAL]arg was other than
ANYMARKorLASTMARK, or a bitwise-OR of the two.
Any error number returned in errno(3) in response to a general ioctl(2s) failure
can also be returned in response to I_ATMARK(7) (see streamio(7)). See also ioctl(2p).
5.3.2.6 I_GETSIG
Sets the mask of events for which the Stream head will send a calling process a
{SIGPOLL} or {SIGURG} signal. Events include S_RDBAND, S_WRBAND
and S_BANDURG.
This ioctl(2s) command is discussed under Input and Output Polling.
| fildes | the Stream for which the command is issued; |
| cmd | is ‘I_GETSIG’. |
| arg | is a pointer to a int to contain the retrieved event flags. |
Event flags can include the following band related events:
S_RDBAND | a message of non-zero priority band has been placed to the Stream head read queue. |
S_WRBAND | a priority band that was previously flow controlled has become available for writing (i.e., is no longer flow controlled). |
S_BANDURG | a modifier to S_RDBAND to generate {SIGURG}
instead of {SIGPOLL} in response to the event. |
5.3.2.7 I_SETSIG
Sets the mask of events for which the Stream head will send a calling process a
{SIGPOLL} or {SIGURG} signal. Events include S_RDBAND, S_WRBAND
and S_BANDURG.
This ioctl(2s) command is discussed under Input and Output Polling.
| fildes | the Stream for which the command is issued; |
| cmd | is ‘I_SETSIG’. |
| arg | is an integer value that contains the event flags. |
Event flags can include the following band related events:
S_RDBAND | a message of non-zero priority band has been placed to the Stream head read queue. |
S_WRBAND | a priority band that was previously flow controlled has become available for writing (i.e., is no longer flow controlled). |
S_BANDURG | a modifier to S_RDBAND to generate {SIGURG}
instead of {SIGPOLL} in response to the event. |
5.3.3 The queue Structure
The queue(9) structure is exposed by including sys/stream.h.
typedef struct queue {
struct qinit *q_qinfo; /* info structure for the queue */
struct msgb *q_first; /* head of queued messages */
struct msgb *q_last; /* tail of queued messages */
struct queue *q_next; /* next queue in this stream */
struct queue *q_link; /* next queue for scheduling */
void *q_ptr; /* private data pointer */
size_t q_count; /* number of bytes in queue */
unsigned long q_flag; /* queue state */
ssize_t q_minpsz; /* min packet size accepted */
ssize_t q_maxpsz; /* max packet size accepted */
size_t q_hiwat; /* hi water mark for flow control */
size_t q_lowat; /* lo water mark for flow control */
struct qband *q_bandp; /* band's flow-control information */
unsigned char q_nband; /* number of priority bands */
unsigned char q_blocked; /* number of bands flow controlled */
unsigned char qpad1[2]; /* reserved for future use */
/* Linux fast-STREAMS specific members */
ssize_t q_msgs; /* messages on queue, Solaris counts
mblks, we count msgs */
rwlock_t q_lock; /* lock for this queue structure */
int (*q_ftmsg) (mblk_t *); /* message filter ala AIX */
} queue_t;
|
The following members are defined in SVR 4.2:
| q_qinfo | points to the qinit(9) structure associated with this queue; |
| q_first | first message on the message queue (NULL if message queue is empty); |
| q_last | last message on the message queue (NULL if message queue is empty); |
| q_next | next queue in the Stream; |
| q_link | next queue in the STREAMS scheduler list; |
| q_ptr | pointer to module/driver private data; |
| q_count | number of bytes of messages on the queue; |
| q_flag | queue flag bits (current state of the queue); |
| q_minpsz | minimum packet size accepted; |
| q_maxpsz | maximum packet size accepted; |
| q_hiwat | high water mark (queued bytes) for flow control; |
| q_lowat | low water mark (queued bytes) for flow control; |
| q_bandp | pointer to qband(9) structures associated with this queue; |
| q_nband | the number of qband(9) structures associated with this queue; |
| q_blocked | the number of currently blocked (flow controlled) queue bands; |
| qpad1 | reserved for future use; |
The following members are not defined in SVR 4.2 and are OpenSS7 specific:
| q_msgs | number of messages on the queue; |
| q_lock | queue structure lock; and, |
| q_ftmsg | message filter ala AIX. |
5.3.3.1 Using queue Information
5.3.3.2 queue Flags
#define QENAB (1<< 0) /* queue is enabled to run */ #define QWANTR (1<< 1) /* flow controlled forward */ #define QWANTW (1<< 2) /* back-enable necessary */ #define QFULL (1<< 3) /* queue is flow controlled */ #define QREADR (1<< 4) /* this is the read queue */ #define QUSE (1<< 5) /* queue being allocated */ #define QNOENB (1<< 6) /* do not enable with putq */ #define QUP (1<< 7) /* uni-processor emulation */ #define QBACK (1<< 8) /* the queue has been back enabled */ #define QOLD (1<< 9) /* module supports old style open/close */ #define QHLIST (1<<10) /* stream head is on scan list */ #define QTOENAB (1<<11) /* to be enabled */ #define QSYNCH (1<<12) /* flag for queue sync */ #define QSAFE (1<<13) /* safe callbacks needed */ #define QWELDED (1<<14) /* flags for welded queues */ #define QSVCBUSY (1<<15) /* service procedure running */ #define QWCLOSE (1<<16) /* q in close wait */ #define QPROCS (1<<17) /* putp, srvp disabled */ |
The following queue(9) flags are defined by SVR 4.2:
QENAB | queue is enabled to run |
QWANTR | flow controlled forward |
QWANTW | back-enable necessary |
QFULL | queue is flow controlled |
QREADR | this is the read queue |
QUSE | queue being allocated |
QNOENB | do not enable with putq |
QBACK | the queue has been back enabled |
QOLD | module supports old style open/close |
QHLIST | stream head is on scan list |
The following are not defined by SVR 4.2, but are used by OpenSS7 and other SVR 4.2-based implementations:
QUP | uni-processor emulation |
QTOENAB | to be enabled |
QSYNCH | flag for queue sync |
QSAFE | safe callbacks needed |
QWELDED | flags for welded queues |
QSVCBUSY | service procedure running |
QWCLOSE | q in close wait |
QPROCS | putp, srvp disabled |
5.3.4 The qband Structure
The qband(9) structure and qband_t(9) type are exposed when
sys/stream.h is included and are formatted and contain the following members:
typedef struct qband {
struct qband *qb_next; /* next (lower) priority band */
size_t qb_count; /* number of bytes queued */
struct msgb *qb_first; /* first queue message in this band */
struct msgb *qb_last; /* last queued message in this band */
size_t qb_hiwat; /* hi water mark for flow control */
size_t qb_lowat; /* lo water mark for flow control */
unsigned long qb_flag; /* flags */
long qb_pad1; /* OSF: reserved */
} qband_t;
#define qb_msgs qb_pad1
|
Where the members are interpreted as follows:
| qb_next | points to the next (lower) priority band; |
| qb_count | number of bytes queued to this band in the message queue; |
| qb_first | the first message queued in this band (NULL if band is empty); |
| qb_last | the last message queued in this band (NULL if band is empty); |
| qb_hiwat | high water mark (in bytes queued) for this band; |
| qb_lowat | low water mark (in bytes queued) for this band; |
| qb_flag | queue band flags (see below); |
| qb_pad1 | reserved for future used; and, |
| qb_msgs | same as qb_padq: contains the number of messages queued to the band. |
Including sys/stream.h also exposes the following constants for use with the
qb_flag member of the qband(9) structure:
QB_FULL | when set, indicates that the band is considered full; |
QB_WANTW | when set, indicates that a preceding queue wants to write to this band; and, |
QB_BACK | when set, indicates that the queue needs to be back-enabled. |
5.3.4.1 Using qband Information
5.3.5 Message Processing
5.3.5.1 Flow Control
5.3.6 Scheduling
5.3.6.1 Flow Control Variables
5.3.6.2 Flow Control Procedures
5.3.6.3 The STREAMS Scheduler
5.4 Service Interfaces
5.4.1 Service Interface Benefits
5.4.2 Service Interface Library Example
5.4.2.1 Accessing the Service Provider
5.4.2.2 Closing the Service Provider
5.4.2.3 Sending Data to the Service Provider
5.4.2.4 Receiving Data
5.4.2.5 Module Service Interface Example
5.5 Message Allocation
5.5.1 Recovering From No Buffers
5.6 Extended Buffers
6 Polling
6.1 Input and Output Polling
6.2 Controlling Terminal
7 Modules and Drivers
7.1 Environment
7.2 Input-Output Control
7.3 Flush Handling
7.4 Driver-Kernel Interface
7.5 Design Guidelines
8 Modules
8.1 Module
8.2 Module Flow Control
8.3 Module Design Guidelines
9 Drivers
9.1 External Device Numbers
9.2 Internal Device Numbers
9.3 spec File System
9.4 Clone Device
9.5 Named STREAMS Device
9.6 Driver
9.7 Cloning
9.8 Loop-Around Driver
9.9 Driver Design Guidelines
10 Multiplexing
10.1 Multiplexors
10.2 Connecting and Disconnecting Lower Stream
10.3 Multiplexor Construction Example
10.4 Multiplexing Driver
10.5 Persistent Links
10.6 Multiplexing Driver Design Guidelines
11 Pipes and FIFOs
11.1 Pipes and FIFOs
11.2 Flushing Pipes and FIFOs
11.3 Named Streams
11.4 Unique Connections
12 Terminal Subsystem
12.1 Terminal Subsystem
12.2 Pseudo-Terminal Subsystem
13 Synchronization
This chapter describes how to multi-thread a STREAMS driver or module. It covers the necessary conversion topics so that new and existing STREAMS modules and drivers will run in a symmetrical multi-processor kernel. This chapter covers primarily STREAMS specific multiprocessor issues and techniques.
Linux is a fully SMP capable operating system able to make effective use of the available parallelism of the symmetric shared-memory multiprocessor computer. All kernel subsystems are multiprocessor safe: scheduler, virtual memory, file systems, block, character, STREAMS input and output, networking protocols and device drivers.
STREAMS in an MP environment introduces some new concepts and terminology as follows:
- Thread
sequence of instructions executed within the context of a process
- Lock
mechanism for restricting access to data structures
- Single Threaded
restricting access to a single thread
- Multi-Threaded
allowing two or more threads access
- Multiprocessing
two or more CPUs concurrently executing the operating system
The Linux 2.6 and 3.x kernel is multi-threaded to make effective use of symmetric shared-memory multiprocessor computers. All parts of the kernel, including STREAMS modules and drivers, must ensure data integrity in a multiprocessing environment. For the most part, developers must ensure that concurrently running kernel threads do not attempt to manipulate the same data at the same time. The STREAMS framework provides multiprocessing Syncrhonization Levels, which allows the developer control over the level of concurrency allowed in a module. The SVR 4.2 MP DDI/DKI also provides locking mechanisms for protecting data.
There are two types of entry points, callbacks and callouts in the OpenSS7 subsystem:
- Synchronous.
These entry points (callouts) and callbacks are referenced against a STREAMS queue structure.
That is, they were invoked using a STREAMS queue structure as an argument. These procedures
are as follows:
put(9s)– srv(9s)– qopen(9)– qclose(9)– qbufcall(9)– qtimeout(9)– mi_bufcall(9)– putq(9)– putbq(9)– putnext(9)– qreply(9)– - Asynchronous.
These callbacks are not referenced against a STREAMS queue structure. That is, they
were invoked without a specific STREAMS queue structure as an argument (known to
STREAMS). These procedures are as follows:
bufcall(9)– esbbufcall(9)– timeout(9)– esballoc(9)(free routine)
13.1 MT Configuration
SVR 4.2 MP specifies a synchronization mechanism that can be used during configuration of a STREAMS driver or module to specify the level of synchronization required by a module. The SVR 4 synchronization levels are as follows:
SQLVL_DEFAULT-
Default level synchronization. Specifies that the module uses the default synchronization scheme. This is the same as specifying
SQLVL_MODULE. SQLVL_GLOBAL-
Global (STREAMS scheduler) level synchronization. Specifies that all of STREAMS can be access by only one thread at the same time. The module is run with global synchronization. This means that only one STREAMS executive thread will be permitted to enter any module. This makes the entire STREAMS executive single threaded and is useful primarily for debugging. This is the same as "Uniprocessor Emulation" on some systems, and reduces the STREAMS executive to running on a single processor at a time. This option should normally be used only for debugging.
SQLVL_ELSEWHERE-
Module group level synchronization. Specifies that the module is run with synchronization within a group of modules. Only one thread of execution will be within the group of modules at a time. The group is separately specified as a character string name. This permits a group of modules to run single threaded as though they are running on a single processor, without interfering with the concurrency of other modules outside the group. This can be important for testing and for modules that implicitly share unprotected data structures.
SQLVL_MODULE-
Module level synchronization. Specifies that all instances of a module can be accessed by only one thread at the same time. This is the default value. The module is run with synchronization at the module. Only one thread of execution will be permitted within the module. Where the module does not share data structures between modules, this has a similar effect on running on a uniprocessor system. This is the default and works best for non-multiprocessor-safe modules written in accordance with STREAMS guidelines. This level is roughly equivalent to Solaris
D_MTPERMODperimeters. SQLVL_QUEUEPAIR-
Queue pair level synchronization. Specifies that each queue pair can be accessed by only one thread at the same time. Only one thread will be permitted to enter a given queue’s procedures within a given queue pair. Where the read and write side of the queue pair share the same private structure (‘q->q_ptr’), this provides multiprocessor protection of the common data structure to all synchronous entry points without an external lock. This level is roughly equivalent to Solaris
D_MTAPAIRperimeters. SQLVL_QUEUE-
Queue level synchronization. Specifies that each queue can be accessed by only one thread at the same time. The module is run with synchronization at the queue. Only one thread of execution will be permitted to enter a given queue’s procedures, however, another thread will be permitted to enter procedures of the other queue in the queue pair. This is useful when the read and write side of a module are largely independent and do not require synchronization between sides of the queue pair. This level is roughly equivalent to Solaris
D_MTPERQperimeters. SQLVL_NOP-
No synchronization. Specifies that each queue can be accessed by more than one thread at a the same time. The protection of internal data and of
put(9s)andsrv(9s)procedures againsttimeout(9)orbufcall(9)is done by the module or driver itself. This synchronization level should be used essentially for multiprocessor-efficient modules. This level is roughly equivalent to SolarisD_MPflag.
13.2 Synchronous Entry Points
Synchronous Entry Points are those entry points into the STREAMS driver or module that will be synchronized according to the specified synchronization level.
put(9s)Queue put procedure. If the module has any synchronization level other than
SQLVL_NOP, the put procedure will be exclusive. Attempts to enter the put procedure while another thread is running within the synchronization level will result in the call being postponed until the thread currently in the synchronization level exits.srv(9s)If the module has any synchronization level other than
SQLVL_NOP, Queue service procedure. the service procedure will be exclusive. Attempts to enter the service procedure while another thread is running within the synchronization level will result in the service procedure being postponed until the thread currently in the synchronization level exits.qopen(9)Queue open procedure. The queue open procedure is synchronous and exclusive before the call to
qprocson(9), or in any event, until return from the procedure. If the module has synchronization level of global, elsewhere or per-module; the call to theqopen(9)procedure is exclusive.qclose(9)Queue close procedure. The queue close procedure is synchronous and exclusive after the call to
qprocsoff(9), or in any event, after return from the procedure. If the module has synchronization level of global, elsewhere or per-module; the call to theqclose(9)procedure is exclusive.qprocson(9)Queue procedures on.
qprocsoff(9)Queue procedures off.
freezestr(9)Freeze stream.
unfreezestr(9)Thaw stream.
qwriter(9)Queue writer.
13.3 Synchronous Callbacks
Synchronous Callbacks are those callbacks into the STREAMS driver or module that will be synchronized according to the specified synchronization level. Synchronous callbacks are an extension to the UNIX System V Release 4.2 specifications of STREAMS. Synchronous callback extensions include Solaris extensions and AIX extensions.
These include:
qbufcall(9) | – queue referenced buffer call |
qtimeout(9) | – queue referenced timeout |
qunbufcall(9) | – queue referenced buffer call cancel |
quntimeout(9) | – queue referenced timeout cancel |
mi_bufcall(9) | – queue reference buffer call |
13.4 Synchronous Callouts
putnext(9) | – |
qreply(9) | – |
13.5 Asynchronous Entry Points
13.6 Asynchronous Callbacks
Asynchronous Callbacks are those callbacks into the STREAMS driver or module that will not be synchronized according to the specified synchronization level. Asynchronous callbacks are the basic UNIX System V Release 4.2 callbacks.
13.7 Asynchronous Callouts
13.8 STREAMS Framework Integrity
The STREAMS framework guarantees the integrity of the STREAMS scheduler and related data
structures, such as the queue(9), msgb(9), and datab(9) structures,
assuming that the module properly accesses global operating system data structures, utilities and
facilities.
The q_next and q_ptr members of the queue(9) structure will not be
modified by the system while a thread is actively executing within a synchronous entry point. The
q_next member of the queue(9) structure could change while a thread is executing
within an asynchronous entry point.
A STREAMS module or driver must not call another module’s put or service
procedure directly. The STREAMS utilities putnext(9), put(9s) and others
described in Utilities must be used to pass messages to another queue. Calling another
STREAMS module or driver directly circumvents the MP-STREAMS framework.48
To make a STREAMS module or driver MP-SAFE requires that the integrity of private module data structures be protected by the module itself. The integrity of private module data structures can be maintained either by using the MP-STREAMS framework to control concurrency and synchronize access to private data structures, or by the use of private locks within the module, or a combination of the two.
13.9 MP Message Ordering
STREAMS guarantees the ordering of messages along a Stream if all the modules in the Stream preserve message ordering internally. This ordering guarantee only applies to message that are sent along the same Stream and produced by the same source.
STREAMS does not guarantee that a message has been seen by the next put procedure
by the time that putnext(9) or qreply(9) return. Under some circumstances,
invocation of the next module’s put procedure might be deferred until after an exclusive
thread leaves a synchronization boundary.
Regardless of STREAMS integrity protection, or the presence of synchronization barriers, at
most one thread will be executing a given module’s service procedure.
13.10 MP-UNSAFE Modules
STREAMS supports modules that are not MP-SAFE and that are expecting to run in a uniprocessor environment.
By default, all STREAMS modules and drivers are considered MP-UNSAFE unless configured into the system as MP-SAFE.
Unsafe drivers run with only the minimum of modification. Unsafe drivers are synchronized, by
default, at the level SQLVL_MODULE, which implies that, at any time, only one processor
in the entire system is executing the module’s STREAMS code. MP-UNSAFE modules might
not gain any performance advantage by being run in a multiprocessor environment.
MP-UNSAFE modules that access data structures private to other STREAMS modules must be
synchronized at a broader level of synchronization. All such cooperating modules must be run with
synchronization at the level SQLVL_ELSEWHERE, with a synchronization queue that is shared
across all the pertinent modules.
MP-UNSAFE modules that do not share data between Stream instances but do shared Stream private
data between the read and write put and service procedures can be synchronized at level
SQLVL_QUEUEPAIR and will gain some advantage in the multiprocessor environment.
MP-UNSAFE modules that do not share data between Stream instances and do not share data
between read and write side put and service procedures, but do share data between put and service
procedure on the same side, can be synchronized at level SQLVL_QUEUE and will gain some
advantage in the multiprocessor environment.
MP-UNSAFE modules that shared data between Stream instances, but only in the open and close
routines, can still assign SQLVL_QUEUEPAIR or SQLVL_QUEUE, provided that an
outer barrier is also established using the Solaris®-style outer perimeter
(with the D_MTOCEXCL flag).
13.10.1 MP-UNSAFE Open and Close Routines
MP-UNSAFE modules are still responsible for cancelling all outstanding callbacks in their qi_qclose procedure.
MP-UNSAFE modules that are synchronized at SQLVL_QUEUEPAIR or
SQLVL_QUEUE, that do not have an exclusive outer perimited established with
D_MTOCEXCL, must call qprocsoff(9) in the qi_qclose routine, in
addition to cancelling all oustanding callbacks, before deallocating Stream private structures or
altering q_qptr pointers.
13.10.2 MP-UNSAFE Put and Service Procedures
13.10.3 MP-UNSAFE Interrupt Service Routines
MP-UNSAFE modules synchronized at synchronization level SQLVL_MODULE,
SQLVL_ELSEWHERE, or SQLVL_GLOBAL are singly threaded within the STREAMS
framework. However, interrupt service routines exist outside the STREAMS framework.
Interrupt service routines that invoke STREAMS utilities will have execution of those
utilities deferred until after all threads have left the synchronization barrier.
13.10.4 MP-UNSAFE Shared Data Structures
Modules that share data structure(s), and that are to be protected by STREAMS synchronization, must be configured at the same level of synchronization.
13.10.5 MP-UNSAFE Sleeping
An MP-UNSAFE module that must wait in its open or close procedure for a
message from another STREAMS module must wait outside of all synchronization barriers;
otherwise the responding thread might never be allowed to enter the synchronization barrier to invoke
the module’s put or service procedure. Sleeping outside the synchronization
barriers is accomplished by using qwait(9) or qwait_sig(9).
Modules using STREAMS synchronization barriers, either explicitly by configuration, or by
default, must use qwait(9) and qwait_sig(9) instead of CV_WAIT(9) or
CV_WAIT_SIG(9) from within qi_qopen and qi_qclose
procedures.49
13.11 MP-SAFE Modules
13.11.1 MP Put and Service Procedures
The STREAMS utilities qprocson(9) and qprocsoff(9) enable and disable the
put and service procedures of a queue pair. Prior to a call to
qprocson(9) and after a call to qprocsoff(9), the module’s put and
service procedures are disabled. Messages flow around the module as if it were not
present in the Stream.
qprocson(9) must be called by the first open(2s) of a module, but only after
allocation and initialization of any module resources or private data structures upon which the
put and service procedures depend. qprocsoff(9) must be called by the
close(2s) routine of a module before deallocating any resources on which the put
and service procedures depend.
For example, it is typical for a module’s qi_qopen procedure to allocate a private data
structure and associate it with the read- and write-queue q_ptr pointer for use by both the
put and service procedure. It is typical for a module’s qi_qclose
procedure to free the private data structure. In this case, qprocson(9) should not be
called until after the private data structure has been allocated, initialized and attached to the
q_ptr pointers. qprocsoff(9) should be called before deallocating the
private data structure and invalidating the q_ptr pointers.
13.11.2 MP Timeout and Buffer Callbacks
The timeout(9), bufcall(9) and esbbcall(9) callbacks are asynchronous
when invoked from outside the STREAMS framework. The means that the timeout(9),
bufcall(9), or esbbcall(9) callback functions might execute concurrent with module
procedures.
In contrast, under OpenSS7, when timeout(9), bufcall(9), and
esbbcall(9) are invoked from within the STREAMS framework,50 they
are equivalent to a call to qtimeout(9), qbufcall(9) with the current
synchronization queue used as the q argument. This is possible because STREAMS always
knows what queue’s synchronous
procedures or callbacks it is running.
To provide for synchronous callbacks that can be invoked from outside the STREAMS framework,
the qtimeout(9), quntimeout(9) qbufcall(9), and qunbufcall(9)
STREAMS utilities are provided. When using these utilities, the callback function is executed
inside any synchronization barrier associated with the queue that is passed to the function.
There are some restrictions on which queue pointer the qtimeout(9) and qbufcall(9)
can be passed when called from a module’s open or close procedure, or when
called from outside STREAMS (at soft or hard interrupt). The caller is responsible for the
validity of the queue pointer. That is, the queue must be allocated and have procedures enabled
across the call. The queue pointer argument of a module’s open, close,
put, or service procedure can always be passed as an argument to these functions
without any special consideration. They should not be passed a q->q_next pointer, unless the
Stream is first frozen by the caller with freezestr(9). They may be passed a
driver’s read-side queue pointer, or a lower multiplexed Stream’s write-side queue pointer,
provided that the caller can ensure that the driver is not closed and the multiplexed Stream
is not unlinked across the call. Reference to interior queue pairs must not be performed unless the
Stream has first been frozen by the caller with freezestre(9).
13.11.3 MP Open and Close Procedures
STREAMS modules are permitted to sleep in their qi_qopen and qi_qclose
procedures. However, MP-UNSAFE modules that use synchronization of these procedures against
put and service procedures must leave the synchronization barrier before
sleeping. This is accomplished by using the qwait(9) and qwait_sig(9)
STREAMS utilities. These utilities are similar to CV_WAIT(9) and
CV_WAIT_SIG(9), however, they release the synchronization barrier before sleeping. These
MP-UNSAFE utilities may also be used by MP-SAFE modules; however, MP-SAFE modules may also use
CV_WAIT(9) or CV_WAIT_SIG(9).
Because callback functions can be asynchronous with respect to the STREAMS framework, they
might execute concurrent with a module’s close procedure. It is the responsibility of the
module to cancel all outstanding callbacks before deallocating or invalidating references to data
structures upon which those callbacks depend, and before returning from the close
procedure.
A callback function scheduled with timeout(9) or bufcall(9) are guaranteed to have
been cancelled by the time that the corresponding untimeout(9) or unbufcall(9)
utilities return. The same is true for qtimeout(9), qbufcall(9),
quntimeout(9) and qunbufcall(9).
The Mentat Portable Streams (MPS®) framework provided by the STREAMS
Compatibility Modules package for Linux Fast-STREAMS also provides an mi_bufcall(9)
function and mi_timer(9) function that can be used to manage buffer callbacks and timeouts
as well as converting these asyncrhonous events into STREAMS synchronous events.
13.11.4 MP Module Unloading
STREAMS tracks kernel module references and prohibits a kernel module from unloading while
there is a reference to a statically allocated data structure contained within the kernel module.
If a STREAMS module does not cancel all callbacks in the module close procedure, the
associated kernel module must not be permitted to be unloaded. STREAMS handles all references
with the exception of references to the free routine provided to esballoc(9).
STREAMS loadable kernel modules that pass free routines to esballoc(9) are
responsible for incrementing their own module counts upon the call to esballoc(9) and
decrementing them when the free_rtn function exits.51
13.11.5 MP Locking
Basic spin locks or reader/writer locks can be used by MP-SAFE modules to protect module private data structures. When using locks, however, the following guidelines should be followed:
- Avoid holding module private locks across calls to
putnext(9),qreply(9), or other STREAMS utilities that invoke aputprocedure, unless re-entrancy is provided. Otherwise, the calling thread might reenter the same queue procedure and attempt to take the same lock twice, causing a single-party deadlock scenario. - Do no hold module private locks, acquired in
putorserviceprocedures, across the calls toqprocson(9)orqprocsoff(9). These utilities spin waiting for allputandserviceprocedures to exit, causing a single-party deadlock scenario. - Do not hold locks, acquired in the
timeout(9)orbufcall(9)callback functions across calls tountimeout(9)orunbufcall(9). These utilities spin waiting for the callback function to exit, causing a single-party deadlock scenario.
13.11.6 MP Asynchronous Callbacks
Interrupt service routines and other asynchronous callback functions require special care by the STREAMS driver writer, because they can execute asynchronous to threads executing within the STREAMS framework.
MP-SAFE modules, or modules using synchronization barriers can use the qtimeout(9) and
qbufcall(9) callbacks that are synchronous with respect to the STREAMS framework.
Under OpenSS7, even timeout(9) and bufcall(9) utilities are
synchronous with respect to the STREAMS framework when invoked from within a qi_putp
procedure, qi_srvp procedure, or a synchronous callback. However, when invoked from
outside a STREAMS module procedure (or from within qi_qopen or qi_qclose
procedures, these functions generate asynchronous callbacks.
Because an asynchronous thread from outside of STREAMScan enter the driver at any time, the
driver writer is responsible for ensuring that the asynchronous callback function acquires the
necessary private locks before accessing private module data structures and releases those locks
before returning. It is also the responsibility of the module to cancel any outstanding callback
functions (see untimeout(9) and unbufcall(9)) before the data structures upon
which they depend are deallocated and the module closed.
The following guidelines must be followed:
- Interrupt service routines must be disabled by the callback if the interrupt service routine is accessing shared data structures with the callback function.
- Outstanding callbacks from
timeout(9)andbufcall(9)must be cancelled with a call tountimeout(9)orunbufcall(9). - Outstanding callbacks from
esballoc(9), must be allowed to complete before the kernel module is permitted to be unloaded.
13.12 Stream Integrity
The q_next field of the queue(9) structure can be dereferenced in that queue’s
qi_qopen, qi_qclose, qi_putp, and qi_srvp procedures as well as
within any other synchronous procedure or callback (such as qtimeout(9),
qbufcall(9), qwriter(9)) predicated on a queue in the same Stream.
All code executing outside the STREAMS framework, such as interrupt service routines,
tasklets, network bottom halves, asynchronous timeout(9), bufcall(9), and
esballoc(9) callback routines, are not permitted to dereference q_next for any
queue pair in any Stream. Asynchronous procedures must use the ‘next’ version of all
functions (e.g, ‘canputnext(q)’ instead of ‘canput(q->q_next)’).
14 Reference
14.1 Files
14.2 System Modules
14.3 System Drivers
14.4 System Calls
14.5 Input-Output Controls
14.6 Module Entry Points
14.7 Structures
14.8 Registration
14.9 Message Handling
14.10 Queue Handling
14.11 Miscellaneous Functions
14.12 Extensions
14.13 Compatibility
15 Conformance
15.1 SVR 4.2 Compatibility
15.2 AIX Compatibility
15.3 HP-UX Compatibility
15.4 OSF/1 Compatibility
15.5 UnixWare Compatibility
15.6 Solaris Compatibility
15.7 SUX Compatibility
15.8 UXP Compatibility
16 Portability
16.1 Core Function Support
16.1.1 Core Message Functions
adjmsg(9) | trim bytes from the front or back of a STREAMS message |
allocb(9) | allocate a STREAMS message and data block |
bufcall(9) | install a buffer callback |
copyb(9) | copy a STREAMS message block |
copymsg(9) | copy a STREAMS message |
datamsg(9) | tests a STREAMS message type for data |
dupb(9) | duplicate a STREAMS message block |
dupmsg(9) | duplicate a STREAMS message |
esballoc(9) | allocate a STREAMS message and data block with a caller supplied data buffer |
freeb(9) | frees a STREAMS message block |
freemsg(9) | frees a STREAMS message |
linkb(9) | link a message block to a STREAMS message |
msgdsize(9) | calculate the size of the data in a STREAMS message |
msgpullup(9) | pull up bytes in a STREAMS message |
pcmsg(9) | test a data block message type for priority control |
pullupmsg(9) | pull up the bytes in a STREAMS message |
rmvb(9) | remove a message block from a STREAMS message |
testb(9) | test if a STREAMS message can be allocated |
unbufcall(9) | remove a STREAMS buffer callback |
unlinkb(9) | unlink a message block from a STREAMS message |
16.1.2 Core UP Queue Functions
backq(9) | find the upstream or downstream queue |
bcanput(9) | test flow control on a STREAMS message queue |
canenable(9) | test whether a STREAMS message queue can be scheduled |
enableok(9) | allow a STREAMS message queue to be scheduled |
flushband(9) | flushes band STREAMS messages from a message queue |
flushq(9) | flushes messages from a STREAMS message queue |
getq(9) | gets a message from a STREAMS message queue |
insq(9) | inserts a message into a STREAMS message queue |
noenable(9) | disable a STREAMS message queue from being scheduled |
OTHERQ(9) | return the other queue of a STREAMS queue pair |
putbq(9) | put a message back on a STREAMS message queue |
putctl(9) | put a control message on a STREAMS message queue |
putctl1(9) | put a 1 byte control message on a STREAMS message queue |
putq(9) | put a message on a STREAMS message queue |
qenable(9) | schedules a STREAMS message queue service routine |
qreply(9) | replies to a message from a STREAMS message queue |
qsize(9) | return the number of message on a queue |
RD(9) | return the read queue of a STREAMS queue pair |
rmvq(9) | remove a message from a STREAMS message queue |
SAMESTR(9) | test for STREAMS pipe or FIFO |
WR(9) | return the write queue of a STREAMS queue pair |
16.1.3 Core MP Queue Functions
canputnext(9) | test flow control on a message queue |
canputnext(9) | test flow control on a message queue |
freezestr(9) | freeze the state of a stream queue |
put(9s) | invoke the put procedure for a STREAMS module or driver with a STREAMS message |
putnext(9) | put a message on the downstream STREAMS message queue |
putnextctl1(9) | put a 1 byte control message on the downstream STREAMS message queue |
putnextctl(9) | put a control message on the downstream STREAMS message queue |
qprocsoff(9) | disables STREAMS message queue processing for multi-processing |
qprocson(9) | enables STREAMS message queue processing for multi-processing |
strqget(9) | gets information about a STREAMS message queue |
strqset(9) | sets attributes of a STREAMS message queue |
unfreezestr(9) | thaw the state of a stream queue |
16.1.4 Core DDI/DKI Functions
kmem_alloc(9) | allocate kernel memory |
kmem_free(9) | deallocates kernel memory |
kmem_zalloc(9) | allocate and zero kernel memory |
cmn_err(9) | print a kernel command error |
bcopy(9) | copy byte strings |
bzero(9) | zero a byte string |
copyin(9) | copy user data in from user space to kernel space |
copyout(9) | copy user data in from kernel space to user space |
delay(9) | postpone the calling process for a number of clock ticks |
drv_getparm(9) | driver retrieve kernel parameter |
drv_hztomsec(9) | convert kernel tick time between microseconds or milliseconds |
drv_htztousec(9) | convert kernel tick time between microseconds or milliseconds |
drv_msectohz(9) | convert kernel tick time between microseconds or milliseconds |
drv_priv(9) | check if the current process is privileged |
drv_usectohz(9) | convert kernel tick time between microseconds or milliseconds |
drv_usecwait(9) | delay for a number of microseconds |
min(9) | determine the minimum of two integers |
max(9) | determine the maximum of two integers |
getmajor(9) | get the internal major device number for a device |
getminor(9) | get the extended minor device number for a device |
makedevice(9) | create a device from a major and minor device numbers |
strlog(9) | pass a message to the STREAMS logger |
timeout(9) | start a timer |
untimeout(9) | stop a timer |
mknod(9) | make block or character special files |
mount(9) | mount and unmount file systems |
umount(9) | mount and unmount file systems |
unlink(9) | remove a file |
16.1.5 Some Common Extension Functions
linkmsg(9) | link a message block to a STREAMS message |
putctl2(9) | put a two byte control message on a STREAMS message queue |
putnextctl2(9) | put a two byte control message on the downstream STREAMS message queue |
weldq(9) | weld two (or four) queues together |
unweldq(9) | unweld two (or four) queues |
16.1.6 Some Internal Functions
allocq(9) | allocate a STREAMS queue pair |
bcanget(9) | test for message arrival on a band on a stream |
canget(9) | test for message arrival on a stream |
freeq(9) | deallocate a STREAMS queue pair |
qattach(9) | attach a module onto a STREAMS file |
qclose(9) | close a STREAMS module or driver |
qdetach(9) | detach a module from a STREAMS file |
qopen(9) | call a STREAMS module or driver open routine |
setq(9) | set sizes and procedures associated with a STREAMS message queue |
16.1.7 Some Oddball Functions
appq(9) | append one STREAMS message after another |
esbbcall(9) | install a buffer callback for an extended STREAMS message block |
isdatablk(9) | test a STREAMS data block for data type |
isdatamsg(9) | test a STREAMS data block for data type |
kmem_zalloc_node(9) | allocate and zero memory on a node |
msgsize(9) | calculate the size of the message blocks in a STREAMS message |
qcountstrm(9) | add all counts on all STREAMS message queues in a stream |
xmsgsize(9) | calculate the size of message blocks in a STREAMS message |
16.2 SVR 4.2 Portability
This section captures portability information for SVR 4.2 MP based systems. If the operating system from which you are porting more closely fits one of the other portability sections, please see that section.
16.2.1 Differences from SVR 4.2 MP
OpenSS7 has very few differences from SVR 4.2 MP. Not all SVR 4.2 MP functions are implemented in the base OpenSS7 kernel modules. Some functions are included in the SVR 4.2 MP compatibility module, streams-svr4compat.o.
16.2.2 Commonalities with SVR 4.2 MP
16.2.3 Compatibility functions for SVR 4.2 MP
itimeout(9) | Perform a timeout at an interrupt level. |
lbolt(9) | Time in ticks since reboot. |
sleep(9) | Put a process to sleep. |
wakeup(9) | Wake a process. |
vtop(9) | Convert virtual to physical address. |
16.2.3.1 Priority Levels
Linux has a different concept of priority levels than SVR 4.2 MP. Linux has basically 4 priority levels as follows:
- Preemptive
At this priority level, software and hardware interrupts are enabled and the kernel is executing with preemption enabled. This means that the currently executing kernel thread could preempt and sleep in favour of another thread of kernel execution.
This priority level only exists on preemptive (mostly 2.6 or 3.x) kernels.
- Non-Preemptive
At this priority level, software and hardware interrupts are enabled and the kernel is executing with preemption disabled. This means that the currently executing kernel thread will only be interrupted by software or hardware interrupts.
This priority level exists in all kernels.
- Software Interrupts Disabled
At this priority level, software interrupts are disabled and the kernel is executing with preemption disabled. This means that the currently executing kernel thread will only be interrupted by hardware interrupts.
This is the case when the executing thread is processing a software interrupt, or when the currently executing thread has disabled software interrupts.
This priority level exists in all kernels.
- Interrupt Service Routines Disabled
At this priority level, hardware interrupts are disabled and the kernel is executing with preemption disabled. This means that the currently executing kernel thread will not be interrupted.
This is the case when the executing thread is processing a hardware interrupt, or when the currently executing thread has disabled hardware interrupts.
This priority level exists in all kernels.
spl0(9) | Set priority level 0. |
spl1(9) | Set priority level 1. |
spl2(9) | Set priority level 2. |
spl3(9) | Set priority level 3. |
spl4(9) | Set priority level 4. |
spl5(9) | Set priority level 5. |
spl7(9) | Set priority level 6. |
spl7(9) | Set priority level 7. |
spl(9) | Set priority level. |
splx(9) | Set priority level x. |
16.2.3.2 Atomic Integers
ATOMIC_INT_ADD(9) | Add an integer value to an atomic integer. |
ATOMIC_INT_ALLOC(9) | Allocate and initialize an atomic integer. |
ATOMIC_INT_DEALLOC(9) | Deallocate an atomic integer. |
ATOMIC_INT_DECR(9) | Decrement and test an atomic integer. |
ATOMIC_INT_INCR(9) | Increment an atomic integer. |
ATOMIC_INT_INIT(9) | Initialize an atomic integer. |
ATOMIC_INT_READ(9) | Read an atomic integer. |
ATOMIC_INT_SUB(9) | Subtract and integer value from an atomic integer. |
ATOMIC_INT_WRITE(9) | Write an integer value to an atomic integer. |
16.2.3.3 Basic Locks
LOCK(9) | Lock a basic lock. |
LOCK_ALLOC(9) | Allocate a basic lock. |
LOCK_DEALLOC(9) | Deallocate a basic lock. |
LOCK_OWNED(9) | Determine whether a basic lock is head by the caller. |
TRYLOCK(9) | Try to lock a basic lock. |
UNLOCK(9) | Unlock a basic lock. |
16.2.3.4 STREAMS Locks
MPSTR_QLOCK(9) | Release a queue from exclusive access. |
MPSTR_QRELE(9) | Acquire a queue for exclusive access. |
MPSTR_STPLOCK(9) | Acquire a stream head for exclusive access. |
MPSTR_STPRELE(9) | Release a stream head from exclusive access. |
16.2.3.5 Read/Write Locks
RW_ALLOC(9) | Allocate and initialize a read/write lock. |
RW_DEALLOC(9) | Deallocate a read/write lock. |
RW_RDLOCK(9) | Acquire a read/write lock in read mode. |
RW_TRYRDLOCK(9) | Attempt to acquire a read/write lock in read mode. |
RW_TRYWRLOCK(9) | Attempt to acquire a read/write lock in write mode. |
RW_UNLOCK(9) | Release a read/write lock. |
RW_WRLOCK(9) | Acquire a read/write lock in write mode. |
16.2.3.6 Sleep Locks
SLEEP_ALLOC(9) | Allocate a sleep lock. |
SLEEP_DEALLOC(9) | Deallocate a sleep lock. |
SLEEP_LOCK(9) | Acquire a sleep lock. |
SLEEP_LOCKAVAIL(9) | Determine whether a sleep lock is available. |
SLEEP_LOCKOWNED(9) | Determine whether a sleep lock is held by the caller. |
SLEEP_LOCK_SIG(9) | Acquire a sleep lock. |
SLEEP_TRYLOCK(9) | Attempt to acquire a sleep lock. |
SLEEP_UNLOCK(9) | Release a sleep lock. |
16.2.3.7 Synchronization Variables
SV_ALLOC(9) | Allocate a basic condition variable. |
SV_BROADCAST(9) | Broadcast a basic condition variable. |
SV_DEALLOC(9) | Deallocate a basic condition variable. |
SV_SIGNAL(9) | Signal a basic condition variable. |
SV_WAIT(9) | Wait on a basic condition variable. |
SV_WAIT_SIG(9) | Interruptible wait on a basic condition variable. |
16.2.3.8 Resource Allocation
rmalloc(9) | Allocate a number of units from a resource map. |
rmallocmap(9) | Allocated a resource map. |
rmallocmap_wait(9) | Allocated a resource map. |
rmalloc_wait(9) | Allocate a number of units from a resource map. |
rmfree(9) | Free a number of units from a resource map. |
rmfreemap(9) | Free a resource map. |
rmget(9) | Allocated a number of units from a resource map. |
rminit(9) | Initialize a resource map. |
rmsetwant(9) | Wait for resources on a resource map. |
rmwanted(9) | Waiters on a resource map. |
16.2.3.9 Device Numbering
major(9) | Get the internal major number of a device. |
makedev(9) | Make a device number from internal major and minor device numbers. |
minor(9) | Get the internal minor number of a device. |
16.2.4 Configuration ala SVR 4.2 MP
16.3 AIX Portability
16.3.1 Differences from AIX 5L Version 5.1
16.3.2 Commonalities with AIX 5L Version 5.1
16.3.3 Compatibility Functions for AIX 5L Version 5.1
16.3.3.1 Core Extensions
putctl2(9) | Put a 2 byte control message on a STREAMS message queue. putctl2(9) is a OpenSS7 core function. |
splstr(9) | Set or restore priority levels. splstr(9) is a OpenSS7 core function. |
splx(9) | Set or restore priority levels. splx(9) is a OpenSS7 core function. |
weldq(9) | Weld together two pairs of STREAMS message queues. weldq(9) is a OpenSS7 core function. |
unweldq(9) | Unweld two pairs of STREAMS message queues. unweldq(9) is a OpenSS7 core function. |
16.3.3.2 Common Module Utilities
mi_bufcall(9) | Reliable alternative to buffcall(9). |
mi_close_comm(9) | STREAMS common minor device close utility. |
mi_next_ptr(9) | STREAMS minor device list traversal. |
mi_open_comm(9) | STREAMS common minor device open utility. |
mi_prev_ptr(9) | STREAMS minor device list traversal. |
16.3.3.3 Registration
str_install(9) | Install a STREAMS module or driver. |
16.3.3.4 Message Filtering
wantio(9) | Perform direct I/O from a STREAMS driver. |
wantmsg(9) | Provide a filter of wanted messages from a STREAMS module. |
16.3.4 Configuration ala AIX 5L Version 5.1
16.4 HP-UX Portability
16.4.1 Differences from HP-UX 11.0i v2
16.4.2 Commonalities with HP-UX 11.0i v2
16.4.3 Compatibility Functions for HP-UX 11.0i v2
16.4.3.1 Core Extensions
streams_put(9) | Invoke the put procedure for a STREAMS module or driver with a STREAMS message. streams_put(9) is implemented using put(9s). put(9s) is a OpenSS7 core function. |
putctl2(9) | Put a 2 byte control message on a STREAMS message queue. putctl2(9) is a OpenSS7 core function. |
putnextctl2(9) | Put a 2 byte control message on the downstream STREAMS message queue. putnextctl2(9) is a OpenSS7 core function. |
unweldq(9) | Unweld two pairs of streams queues. unweldq(9) is a OpenSS7 core function. |
weldq(9) | Weld together two pairs of streams queues. weldq(9) is a OpenSS7 core function. |
16.4.3.2 Registration
str_install(9) | Install a STREAMS module or driver. |
str_uninstall(9) | Uninstall a STREAMS module or driver. |
16.4.3.3 Sleeping
streams_get_sleep_lock(9) | Provide access to the global sleep lock. |
16.4.4 Configuration ala HP-UX 11.0i v2
16.5 OSF/1 Portability
16.5.1 Differences from OSF/1 1.2/Digital UNIX
16.5.2 Commonalities with OSF/1 1.2/Digital UNIX
16.5.3 Compatibility Functions for OSF/1 1.2/Digital UNIX
16.5.3.1 Core Extensions
lbolt(9) | Time in ticks since reboot lbolt(9) is a OpenSS7 core function. |
puthere(9) | Invoke the put procedure for a STREAMS module or driver with a STREAMS message. puthere(9) is implemented using put(9s). put(9s) is a OpenSS7 core function. |
weldq(9) | Weld together two pairs of streams queues. weldq(9) is a OpenSS7 core function. |
unweldq(9) | Unweld two pairs of streams queues. unweldq(9) is a OpenSS7 core function. |
16.5.3.2 Common Module Utilities
streams_close_comm(9) | Common minor device close utility. |
streams_open_comm(9) | Common minor device open utility. |
streams_open_ocomm(9) | Common minor device open utility. |
16.5.3.3 Registration
strmod_add(9) | Add a STREAMS module. |
strmod_del(9) | Delete a STREAMS module or driver from the kernel. |
16.5.3.4 Others
time(9) | (undoc). |
16.5.4 Configuration ala OSF/1 1.2/Digital UNIX
16.6 UnixWare Portability
16.6.1 Differences from UnixWare 7.1.3 (OpenUnix 8)
16.6.2 Commonalities with UnixWare 7.1.3 (OpenUnix 8)
UnixWare provides most of the core functions provide by OpenSS7 along with all of the compatibility functions provided by the SVR 4.2 MP compatibility module. In addition the functions provided here in the UnixWare compatibility module are provided.
16.6.3 Compatibility Functions for UnixWare 7.1.3 (OpenUnix 8)
The following compatibility functions are in addition to all SVR 4.2 compatibility functions.
16.6.3.1 Device Numbering
Device numbering has evolved since UNIX Sytem V Release 3.0 and provides internal, external and extended device numbering. These functions are provided for backward compatibility with some drivers that were written for the older system. These are core functions in the OpenSS7 implementation.
emajor(9) | Get the external (real) major device number from the device number. |
eminor(9) | Get the external extended minor device number from the device number. |
etoimajor(9) | Convert an external major device number to an internal major device number. |
getemajor(9) | Get the external (real) major device number. |
geteminor(9) | Get the external minor device number. |
itoemajor(9) | Convert an internal major device number to an external major device number. |
16.6.3.2 Memory Alignment
In attempting to unify several disparaging UNIX-based systems (in particular XENIX
and UnixWare,
it became necessary to sometimes address the alignment of data buffers. Certainly a better way to
accomplish this would be to allocate data buffers using other allocators that provide the required
alignment and other buffer characteristics and then allocating a message and data block with a call
to esballoc(9).
Nevertheless, these functions were provided for making message blocks, data blocks and data buffers
meet specific physical requirements.
OpenSS7 provides these functions for compatibility, however, most of the physical requirements provided are ignored.
allocb_physreq(9) | Allocate a STREAMS message and data block. |
msgphysreq(9) | Cause a message block to meet physical requirements. |
msgpullup_physreq(9) | Pull up bytes in a STREAMS message. |
msgscgth(9) | (undoc). |
16.6.3.3 Direct STREAMS Input-Output Controls
strioccall(9) | (undoc). |
16.6.4 Configuration ala UnixWare 7.1.3 (OpenUnix 8)
16.7 Solaris Portability
16.7.1 Differences from Solaris 9/SunOS 5.9
16.7.2 Commonalities with Solaris 9/SunOS 5.9
16.7.3 Compatibility Functions for Solaris 9/SunOS 5.9
16.7.3.1 STREAMS Queue Referenced Callbacks
qbufcall(9) | Install a STREAMS buffer callback. |
qunbufcall(9) | Cancel a STREAMS buffer callback. |
qtimeout(9) | Start a timer associated with a queue. |
quntimeout(9) | Stop a timer associated with a queue. |
qwait(9) | Wait for a queue message. |
qwait_sig(9) | Wait for a queue message or signal. |
queclass(9) | Return the class of a STREAMS message. |
qwriter(9) | STREAMS mutex upgrade. |
16.7.3.2 STREAMS Registration
install_driver(9) | Install a device driver. |
mod_info(9) | Provides information on a loadable kernel module to the STREAMS executive. |
mod_install(9) | Installs a loadable kernel module in the STREAMS executive. |
mod_remove(9) | Removes a loadable module from the STREAMS executive. |
16.7.3.3 DDI
Solaris provides a wide array of Device Driver Interface functions available for use by device drivers. Many of these functions are useful for STREAMS device and pseudo-device drivers and modules. Almost all of these functions, however, are Solaris-specific and are completely non-portable to other UNIX-based operating systems. To make matters worse for portability, many of these functions have no SVR 4.2 MP equivalents.
ddi_create_minor_node(9) | Create a minor node for this device. |
ddi_remove_minor_node(9) | Remove a minor node for a device. |
ddi_driver_major(9) | Find the major device number associated with a driver. |
ddi_getiminor(9) | Get the internal minor device number. |
ddi_driver_name(9) | Return normalized driver name. |
ddi_get_cred(9) | Get a reference to the credentials of the current user. |
ddi_get_instance(9) | Get device instance number. |
ddi_get_lbolt(9) | Get the current value of the system tick clock. |
ddi_get_pid(9) | Get the process id of the current process. |
ddi_get_time(9) | Get the current time in seconds since the epoch. |
ddi_removing_power(9) | |
ddi_get_soft_state(9) | |
ddi_soft_state(9) | |
ddi_soft_state_fini(9) | |
ddi_soft_state_free(9) | |
ddi_soft_state_init(9) | |
ddi_soft_state_zalloc(9) | |
ddi_umem_alloc(9) | Allocate page aligned kernel memory. |
ddi_umem_free(9) | Free page aligned kernel memory. |
16.7.3.4 Loadable Module Interface
_fini(9) | |
_info(9) | |
_init(9) | |
attach(9) | Attach a device to the system or resume a suspended device. |
getinfo(9) | |
identify(9) | Determine if a driver is associated with a device. |
detach(9) | Detach a device from the system or suspend a device. |
power(9) | Power a device attached to the system. |
probe(9) |
16.7.4 Configuration ala Solaris 9/SunOS 5.9
16.8 SUX Portability
16.8.1 Differences from Super/UX
16.8.2 Commonalities with Super/UX
16.8.3 Compatibility Functions for Super/UX
lbolt(9) | time in ticks since reboot |
16.8.4 Configuration ala Super/UX
16.9 UXP Portability
16.9.1 Differences from UXP/V
16.9.2 Commonalities with UXP/V
16.9.3 Compatibility Functions for UXP/V
16.9.4 Configuration ala UXP/V
16.9.4.1 Extensions
lis_appq(9) | Append one STREAMS message after another. |
lis_date(9) | |
lis_esbbcall(9) | Install a buffer callback for an extended STREAMS message block. |
lis_find_strdev(9) | |
lis_OTHER(9) | Return the other queue of a STREAMS queue pair.. This function is intended to accommodate a common miss-spelling of OTHERQ(9). |
lis_version(9) | |
lis_xmsgsize(9) | Calculate the size of message blocks in a STREAMS message. |
16.9.4.2 Device Creation and Deletion
lis_mknod(9) | Make block or character special files. |
lis_unlink(9) | Remove a file. |
lis_mount(9) | Mount a file system. |
lis_umount2(9) | Unmount a file system. |
lis_umount(9) | Unmount a file system. |
16.9.4.3 Registration
lis_register_strdev(9) | Register a STREAMS device. |
lis_register_strmod(9) | Register a STREAMS module. |
lis_unregister_strdev(9) | Unregister a STREAMS device. |
lis_unregsiter_strmod(9) | Unregister a STREAMS module. |
17 Developing Portable STREAMS Modules
In the process of creating the OpenSS7 subsystem in such a way so as to facilitate portability of STREAMS drivers and modules from a wide range of UNIX operating system variants, a number of guidelines for the development of portable STREAMS drivers and modules have been developed. These guidelines, when adhered to, will allow the resulting driver or module to be ported to another STREAMS implementation with minimal effort. These portability guidelines are collected here.
17.1 Memory Allocation
Portable STREAMS modules and drivers will always allocate memory using the SVR4
memory allocators/deallocators: kmem_alloc(9), kmem_zalloc(9) and
kmem_free(9).
Additional eligible allocators are:
rmallocmap(9)
rmfreemap(9)
rmalloc(9)
rmalloc_wait(9)
rmfree(9)
rminit(9)
rmsetwant(9)
rmwanted(9)
Unfortunately, these resource map allocators are not available on AIX so, if portability to the AIX is important, then do not use these allocators.
Additional eligible allocators are:
kmem_fast_alloc(9)
kmem_fast_free(9)
17.2 Alignment of Message Buffers
17.3 Disabling and Enabling Queue Procedures
Portable STREAMS modules and drivers will always call qprocson(9) before returning
from its queue open procedure (see qopen(9).
Portable STREAMS modules and drivers will always call qprocsoff(9) upon entering
its queue close procedure (see qclose(9)).
17.4 Freezing and Unfreezing Streams
17.5 Passing Messages from Interrupt Service Routines
17.6 Timeout Call Back and Link Identifiers
Although buffer callbacks identifiers (see bufcall(9)), timeout identifiers (see
timeout(9)), and multiplexing driver link identifiers (see I_LINK
and I_PLINK under
streamio(7)), are often illustrated as small integer numbers, with some STREAMS
implementations, including OpenSS7, these identifiers are kernel addresses
(pointers) and are never small integer values like 1, 2, or 3.
Also, there is no guarantee that the identifier will be positive. It is guaranteed that the returned identifier will not be zero (0). Zero is used by these function as a return value to indicate an error.
Portable STREAMS drivers and modules will not depend upon the returned identifier from
bufcall(9), timeout(9) or streamio(7) as being any specific range of
value. Portable drivers and modules will save any returned identifiers in data types that will not
loose the precision of the identifier.
17.7 Synchronization with Timeouts and Callback Functions
17.8 Synchronization with Callout Functions
17.9 Synchronization of Drivers and Modules
17.10 Special STREAMS Message Types
17.11 Use of Message Allocation Priorities
17.12 Registration and Deregistration
17.13 Device Numbering
17.13.1 UNIX Device Numbering
In versions of UNIX System V previous to Release 4, the major and minor device numbers were each 8 bit, and they were packed into a 16 bit word (usually a C Language short variable). Under UNIX System V Release 4, the device numbers are held in a
dev_tvariable, which is often implemented as a 32 bit integer. The minor device number is held as 14 bits, and a further 8 bits are used for the major device number.dev_tis ofter referred to as the "expanded device type", since it allows many more minor devices than before.Many drivers were written for earlier releases, an may eventually be ported to UNIX System V Release 4. In earlier releases, some manufacturers got around the 256 minor device number limit by using multiple major device numbers for a device. Devices were created with different major device numbers (the external major device number) but they all mapped to the same device driver entry in the device switch tables (the internal device number). Even under this scheme, each major device could only support 256 minor devices, but the driver could support many more. This has been recognized in UNIX System V Release 4, and functions are provided to do this mapping; for example, the function
etoimajor(9)and so on, give a machine independent interface to the device number mapping.52
17.13.2 Linux Device Numbering
Versions of the Linux kernel in the 2.4 kernel series and prior to 2.6 also provided an 8 bit major device number and an 8 bit minor device number grouped into a 16-bit combined device number. Linux 2.6 and 3.x kernels (and some patched 2.4 kernels) now have larger device numbers. These extended device numbers are 12 bits for major device number and 20 bits for minor device number, with 32 bits for the combined device number.
17.13.3 OpenSS7 Device Numbering
OpenSS7 began with extended device numbering. The specfs shadow special
character device file system used by OpenSS7 uses the ‘inode’ number to hold the
dev_t
device number instead of the ‘inode->i_rdev’, which on older kernels is only a 16-bit
short.
In earlier versions of OpenSS7, the internal device numbering is 16-bits for major device number and 16-bits for minor device number. This will soon be changed to 12-bits for major device number and 20-bits for minor device number to accommodate the newer Linux scheme.
On 2.6 and 3.x Linux kernels that support the newer extended device numbers, external device numbers and internal device numbers will be the same. On 2.4 Linux kernels with the older 16-bit device numbers, external device number and internal device numbers will differ. In some situations, an internal device number can exists with no corresponding external device number (accessed only via a clone device or direct access to the mounted specfs shadow special character device file system).
etoimajor(9) | change external to internal major device number |
getemajor(9) | get external major device number |
geteminor(9) | get external minor device number |
itoemajor(9) | change internal to external major device number |
Appendix A Data Structures
A.1 Stream Structures
A.2 Queue Structures
A.3 Message Structures
A.4 Input Output Control Structures
A.5 Link Structures
A.6 Options Structures
Appendix B Message Types
B.1 Message Type
B.2 Ordinary Messages
B.3 High Priority Messages
Appendix C Utilities
Appendix D Debugging
Appendix E Configuration
Appendix F Administration
F.1 Administrative Utilities
F.2 System Controls
F.3 /proc File System
Appendix G Examples
G.1 Module Example
G.2 Driver Example
Appendix H Copying
H.1 GNU Affero General Public License
Copyright © 2007 Free Software Foundation, Inc. http://fsf.org/ Everyone is permitted to copy and distribute verbatim copies of this license document, but changing it is not allowed.
H.1.1 Preamble
The GNU Affero General Public License is a free, copyleft license for software and other kinds of works, specifically designed to ensure cooperation with the community in the case of network server software.
The licenses for most software and other practical works are designed to take away your freedom to share and change the works. By contrast, our General Public Licenses are intended to guarantee your freedom to share and change all versions of a program–to make sure it remains free software for all its users.
When we speak of free software, we are referring to freedom, not price. Our General Public Licenses are designed to make sure that you have the freedom to distribute copies of free software (and charge for them if you wish), that you receive source code or can get it if you want it, that you can change the software or use pieces of it in new free programs, and that you know you can do these things.
Developers that use our General Public Licenses protect your rights with two steps: (1) assert copyright on the software, and (2) offer you this License which gives you legal permission to copy, distribute and/or modify the software.
A secondary benefit of defending all users’ freedom is that improvements made in alternate versions of the program, if they receive widespread use, become available for other developers to incorporate. Many developers of free software are heartened and encouraged by the resulting cooperation. However, in the case of software used on network servers, this result may fail to come about. The GNU General Public License permits making a modified version and letting the public access it on a server without ever releasing its source code to the public.
The GNU Affero General Public License is designed specifically to ensure that, in such cases, the modified source code becomes available to the community. It requires the operator of a network server to provide the source code of the modified version running there to the users of that server. Therefore, public use of a modified version, on a publicly accessible server, gives the public access to the source code of the modified version.
An older license, called the Affero General Public License and published by Affero, was designed to accomplish similar goals. This is a different license, not a version of the Affero GPL, but Affero has released a new version of the Affero GPL which permits relicensing under this license.
The precise terms and conditions for copying, distribution and modification follow.
- Definitions.
“This License” refers to version 3 of the GNU Affero General Public License.
“Copyright” also means copyright-like laws that apply to other kinds of works, such as semiconductor masks.
“The Program” refers to any copyrightable work licensed under this License. Each licensee is addressed as “you”. “Licensees” and “recipients” may be individuals or organizations.
To “modify” a work means to copy from or adapt all or part of the work in a fashion requiring copyright permission, other than the making of an exact copy. The resulting work is called a “modified version” of the earlier work or a work “based on” the earlier work.
A “covered work” means either the unmodified Program or a work based on the Program.
To “propagate” a work means to do anything with it that, without permission, would make you directly or secondarily liable for infringement under applicable copyright law, except executing it on a computer or modifying a private copy. Propagation includes copying, distribution (with or without modification), making available to the public, and in some countries other activities as well.
To “convey” a work means any kind of propagation that enables other parties to make or receive copies. Mere interaction with a user through a computer network, with no transfer of a copy, is not conveying.
An interactive user interface displays “Appropriate Legal Notices” to the extent that it includes a convenient and prominently visible feature that (1) displays an appropriate copyright notice, and (2) tells the user that there is no warranty for the work (except to the extent that warranties are provided), that licensees may convey the work under this License, and how to view a copy of this License. If the interface presents a list of user commands or options, such as a menu, a prominent item in the list meets this criterion.
- Source Code.
The “source code” for a work means the preferred form of the work for making modifications to it. “Object code” means any non-source form of a work.
A “Standard Interface” means an interface that either is an official standard defined by a recognized standards body, or, in the case of interfaces specified for a particular programming language, one that is widely used among developers working in that language.
The “System Libraries” of an executable work include anything, other than the work as a whole, that (a) is included in the normal form of packaging a Major Component, but which is not part of that Major Component, and (b) serves only to enable use of the work with that Major Component, or to implement a Standard Interface for which an implementation is available to the public in source code form. A “Major Component”, in this context, means a major essential component (kernel, window system, and so on) of the specific operating system (if any) on which the executable work runs, or a compiler used to produce the work, or an object code interpreter used to run it.
The “Corresponding Source” for a work in object code form means all the source code needed to generate, install, and (for an executable work) run the object code and to modify the work, including scripts to control those activities. However, it does not include the work’s System Libraries, or general-purpose tools or generally available free programs which are used unmodified in performing those activities but which are not part of the work. For example, Corresponding Source includes interface definition files associated with source files for the work, and the source code for shared libraries and dynamically linked subprograms that the work is specifically designed to require, such as by intimate data communication or control flow between those subprograms and other parts of the work.
The Corresponding Source need not include anything that users can regenerate automatically from other parts of the Corresponding Source.
The Corresponding Source for a work in source code form is that same work.
- Basic Permissions.
All rights granted under this License are granted for the term of copyright on the Program, and are irrevocable provided the stated conditions are met. This License explicitly affirms your unlimited permission to run the unmodified Program. The output from running a covered work is covered by this License only if the output, given its content, constitutes a covered work. This License acknowledges your rights of fair use or other equivalent, as provided by copyright law.
You may make, run and propagate covered works that you do not convey, without conditions so long as your license otherwise remains in force. You may convey covered works to others for the sole purpose of having them make modifications exclusively for you, or provide you with facilities for running those works, provided that you comply with the terms of this License in conveying all material for which you do not control copyright. Those thus making or running the covered works for you must do so exclusively on your behalf, under your direction and control, on terms that prohibit them from making any copies of your copyrighted material outside their relationship with you.
Conveying under any other circumstances is permitted solely under the conditions stated below. Sublicensing is not allowed; section 10 makes it unnecessary.
- Protecting Users’ Legal Rights From Anti-Circumvention Law.
No covered work shall be deemed part of an effective technological measure under any applicable law fulfilling obligations under article 11 of the WIPO copyright treaty adopted on 20 December 1996, or similar laws prohibiting or restricting circumvention of such measures.
When you convey a covered work, you waive any legal power to forbid circumvention of technological measures to the extent such circumvention is effected by exercising rights under this License with respect to the covered work, and you disclaim any intention to limit operation or modification of the work as a means of enforcing, against the work’s users, your or third parties’ legal rights to forbid circumvention of technological measures.
- Conveying Verbatim Copies.
You may convey verbatim copies of the Program’s source code as you receive it, in any medium, provided that you conspicuously and appropriately publish on each copy an appropriate copyright notice; keep intact all notices stating that this License and any non-permissive terms added in accord with section 7 apply to the code; keep intact all notices of the absence of any warranty; and give all recipients a copy of this License along with the Program.
You may charge any price or no price for each copy that you convey, and you may offer support or warranty protection for a fee.
- Conveying Modified Source Versions.
You may convey a work based on the Program, or the modifications to produce it from the Program, in the form of source code under the terms of section 4, provided that you also meet all of these conditions:
- The work must carry prominent notices stating that you modified it, and giving a relevant date.
- The work must carry prominent notices stating that it is released under this License and any conditions added under section 7. This requirement modifies the requirement in section 4 to “keep intact all notices”.
- You must license the entire work, as a whole, under this License to anyone who comes into possession of a copy. This License will therefore apply, along with any applicable section 7 additional terms, to the whole of the work, and all its parts, regardless of how they are packaged. This License gives no permission to license the work in any other way, but it does not invalidate such permission if you have separately received it.
- If the work has interactive user interfaces, each must display Appropriate Legal Notices; however, if the Program has interactive interfaces that do not display Appropriate Legal Notices, your work need not make them do so.
A compilation of a covered work with other separate and independent works, which are not by their nature extensions of the covered work, and which are not combined with it such as to form a larger program, in or on a volume of a storage or distribution medium, is called an “aggregate” if the compilation and its resulting copyright are not used to limit the access or legal rights of the compilation’s users beyond what the individual works permit. Inclusion of a covered work in an aggregate does not cause this License to apply to the other parts of the aggregate.
- Conveying Non-Source Forms.
You may convey a covered work in object code form under the terms of sections 4 and 5, provided that you also convey the machine-readable Corresponding Source under the terms of this License, in one of these ways:
- Convey the object code in, or embodied in, a physical product (including a physical distribution medium), accompanied by the Corresponding Source fixed on a durable physical medium customarily used for software interchange.
- Convey the object code in, or embodied in, a physical product (including a physical distribution medium), accompanied by a written offer, valid for at least three years and valid for as long as you offer spare parts or customer support for that product model, to give anyone who possesses the object code either (1) a copy of the Corresponding Source for all the software in the product that is covered by this License, on a durable physical medium customarily used for software interchange, for a price no more than your reasonable cost of physically performing this conveying of source, or (2) access to copy the Corresponding Source from a network server at no charge.
- Convey individual copies of the object code with a copy of the written offer to provide the Corresponding Source. This alternative is allowed only occasionally and noncommercially, and only if you received the object code with such an offer, in accord with subsection 6b.
- Convey the object code by offering access from a designated place (gratis or for a charge), and offer equivalent access to the Corresponding Source in the same way through the same place at no further charge. You need not require recipients to copy the Corresponding Source along with the object code. If the place to copy the object code is a network server, the Corresponding Source may be on a different server (operated by you or a third party) that supports equivalent copying facilities, provided you maintain clear directions next to the object code saying where to find the Corresponding Source. Regardless of what server hosts the Corresponding Source, you remain obligated to ensure that it is available for as long as needed to satisfy these requirements.
- Convey the object code using peer-to-peer transmission, provided you inform other peers where the object code and Corresponding Source of the work are being offered to the general public at no charge under subsection 6d.
A separable portion of the object code, whose source code is excluded from the Corresponding Source as a System Library, need not be included in conveying the object code work.
A “User Product” is either (1) a “consumer product”, which means any tangible personal property which is normally used for personal, family, or household purposes, or (2) anything designed or sold for incorporation into a dwelling. In determining whether a product is a consumer product, doubtful cases shall be resolved in favor of coverage. For a particular product received by a particular user, “normally used” refers to a typical or common use of that class of product, regardless of the status of the particular user or of the way in which the particular user actually uses, or expects or is expected to use, the product. A product is a consumer product regardless of whether the product has substantial commercial, industrial or non-consumer uses, unless such uses represent the only significant mode of use of the product.
“Installation Information” for a User Product means any methods, procedures, authorization keys, or other information required to install and execute modified versions of a covered work in that User Product from a modified version of its Corresponding Source. The information must suffice to ensure that the continued functioning of the modified object code is in no case prevented or interfered with solely because modification has been made.
If you convey an object code work under this section in, or with, or specifically for use in, a User Product, and the conveying occurs as part of a transaction in which the right of possession and use of the User Product is transferred to the recipient in perpetuity or for a fixed term (regardless of how the transaction is characterized), the Corresponding Source conveyed under this section must be accompanied by the Installation Information. But this requirement does not apply if neither you nor any third party retains the ability to install modified object code on the User Product (for example, the work has been installed in ROM).
The requirement to provide Installation Information does not include a requirement to continue to provide support service, warranty, or updates for a work that has been modified or installed by the recipient, or for the User Product in which it has been modified or installed. Access to a network may be denied when the modification itself materially and adversely affects the operation of the network or violates the rules and protocols for communication across the network.
Corresponding Source conveyed, and Installation Information provided, in accord with this section must be in a format that is publicly documented (and with an implementation available to the public in source code form), and must require no special password or key for unpacking, reading or copying.
- Additional Terms.
“Additional permissions” are terms that supplement the terms of this License by making exceptions from one or more of its conditions. Additional permissions that are applicable to the entire Program shall be treated as though they were included in this License, to the extent that they are valid under applicable law. If additional permissions apply only to part of the Program, that part may be used separately under those permissions, but the entire Program remains governed by this License without regard to the additional permissions.
When you convey a copy of a covered work, you may at your option remove any additional permissions from that copy, or from any part of it. (Additional permissions may be written to require their own removal in certain cases when you modify the work.) You may place additional permissions on material, added by you to a covered work, for which you have or can give appropriate copyright permission.
Notwithstanding any other provision of this License, for material you add to a covered work, you may (if authorized by the copyright holders of that material) supplement the terms of this License with terms:
- Disclaiming warranty or limiting liability differently from the terms of sections 15 and 16 of this License; or
- Requiring preservation of specified reasonable legal notices or author attributions in that material or in the Appropriate Legal Notices displayed by works containing it; or
- Prohibiting misrepresentation of the origin of that material, or requiring that modified versions of such material be marked in reasonable ways as different from the original version; or
- Limiting the use for publicity purposes of names of licensors or authors of the material; or
- Declining to grant rights under trademark law for use of some trade names, trademarks, or service marks; or
- Requiring indemnification of licensors and authors of that material by anyone who conveys the material (or modified versions of it) with contractual assumptions of liability to the recipient, for any liability that these contractual assumptions directly impose on those licensors and authors.
All other non-permissive additional terms are considered “further restrictions” within the meaning of section 10. If the Program as you received it, or any part of it, contains a notice stating that it is governed by this License along with a term that is a further restriction, you may remove that term. If a license document contains a further restriction but permits relicensing or conveying under this License, you may add to a covered work material governed by the terms of that license document, provided that the further restriction does not survive such relicensing or conveying.
If you add terms to a covered work in accord with this section, you must place, in the relevant source files, a statement of the additional terms that apply to those files, or a notice indicating where to find the applicable terms.
Additional terms, permissive or non-permissive, may be stated in the form of a separately written license, or stated as exceptions; the above requirements apply either way.
- Termination.
You may not propagate or modify a covered work except as expressly provided under this License. Any attempt otherwise to propagate or modify it is void, and will automatically terminate your rights under this License (including any patent licenses granted under the third paragraph of section 11).
However, if you cease all violation of this License, then your license from a particular copyright holder is reinstated (a) provisionally, unless and until the copyright holder explicitly and finally terminates your license, and (b) permanently, if the copyright holder fails to notify you of the violation by some reasonable means prior to 60 days after the cessation.
Moreover, your license from a particular copyright holder is reinstated permanently if the copyright holder notifies you of the violation by some reasonable means, this is the first time you have received notice of violation of this License (for any work) from that copyright holder, and you cure the violation prior to 30 days after your receipt of the notice.
Termination of your rights under this section does not terminate the licenses of parties who have received copies or rights from you under this License. If your rights have been terminated and not permanently reinstated, you do not qualify to receive new licenses for the same material under section 10.
- Acceptance Not Required for Having Copies.
You are not required to accept this License in order to receive or run a copy of the Program. Ancillary propagation of a covered work occurring solely as a consequence of using peer-to-peer transmission to receive a copy likewise does not require acceptance. However, nothing other than this License grants you permission to propagate or modify any covered work. These actions infringe copyright if you do not accept this License. Therefore, by modifying or propagating a covered work, you indicate your acceptance of this License to do so.
- Automatic Licensing of Downstream Recipients.
Each time you convey a covered work, the recipient automatically receives a license from the original licensors, to run, modify and propagate that work, subject to this License. You are not responsible for enforcing compliance by third parties with this License.
An “entity transaction” is a transaction transferring control of an organization, or substantially all assets of one, or subdividing an organization, or merging organizations. If propagation of a covered work results from an entity transaction, each party to that transaction who receives a copy of the work also receives whatever licenses to the work the party’s predecessor in interest had or could give under the previous paragraph, plus a right to possession of the Corresponding Source of the work from the predecessor in interest, if the predecessor has it or can get it with reasonable efforts.
You may not impose any further restrictions on the exercise of the rights granted or affirmed under this License. For example, you may not impose a license fee, royalty, or other charge for exercise of rights granted under this License, and you may not initiate litigation (including a cross-claim or counterclaim in a lawsuit) alleging that any patent claim is infringed by making, using, selling, offering for sale, or importing the Program or any portion of it.
- Patents.
A “contributor” is a copyright holder who authorizes use under this License of the Program or a work on which the Program is based. The work thus licensed is called the contributor’s “contributor version”.
A contributor’s “essential patent claims” are all patent claims owned or controlled by the contributor, whether already acquired or hereafter acquired, that would be infringed by some manner, permitted by this License, of making, using, or selling its contributor version, but do not include claims that would be infringed only as a consequence of further modification of the contributor version. For purposes of this definition, “control” includes the right to grant patent sublicenses in a manner consistent with the requirements of this License.
Each contributor grants you a non-exclusive, worldwide, royalty-free patent license under the contributor’s essential patent claims, to make, use, sell, offer for sale, import and otherwise run, modify and propagate the contents of its contributor version.
In the following three paragraphs, a “patent license” is any express agreement or commitment, however denominated, not to enforce a patent (such as an express permission to practice a patent or covenant not to sue for patent infringement). To “grant” such a patent license to a party means to make such an agreement or commitment not to enforce a patent against the party.
If you convey a covered work, knowingly relying on a patent license, and the Corresponding Source of the work is not available for anyone to copy, free of charge and under the terms of this License, through a publicly available network server or other readily accessible means, then you must either (1) cause the Corresponding Source to be so available, or (2) arrange to deprive yourself of the benefit of the patent license for this particular work, or (3) arrange, in a manner consistent with the requirements of this License, to extend the patent license to downstream recipients. “Knowingly relying” means you have actual knowledge that, but for the patent license, your conveying the covered work in a country, or your recipient’s use of the covered work in a country, would infringe one or more identifiable patents in that country that you have reason to believe are valid.
If, pursuant to or in connection with a single transaction or arrangement, you convey, or propagate by procuring conveyance of, a covered work, and grant a patent license to some of the parties receiving the covered work authorizing them to use, propagate, modify or convey a specific copy of the covered work, then the patent license you grant is automatically extended to all recipients of the covered work and works based on it.
A patent license is “discriminatory” if it does not include within the scope of its coverage, prohibits the exercise of, or is conditioned on the non-exercise of one or more of the rights that are specifically granted under this License. You may not convey a covered work if you are a party to an arrangement with a third party that is in the business of distributing software, under which you make payment to the third party based on the extent of your activity of conveying the work, and under which the third party grants, to any of the parties who would receive the covered work from you, a discriminatory patent license (a) in connection with copies of the covered work conveyed by you (or copies made from those copies), or (b) primarily for and in connection with specific products or compilations that contain the covered work, unless you entered into that arrangement, or that patent license was granted, prior to 28 March 2007.
Nothing in this License shall be construed as excluding or limiting any implied license or other defenses to infringement that may otherwise be available to you under applicable patent law.
- No Surrender of Others’ Freedom.
If conditions are imposed on you (whether by court order, agreement or otherwise) that contradict the conditions of this License, they do not excuse you from the conditions of this License. If you cannot convey a covered work so as to satisfy simultaneously your obligations under this License and any other pertinent obligations, then as a consequence you may not convey it at all. For example, if you agree to terms that obligate you to collect a royalty for further conveying from those to whom you convey the Program, the only way you could satisfy both those terms and this License would be to refrain entirely from conveying the Program.
- Remote Network Interaction; Use with the GNU General Public License.
Notwithstanding any other provision of this License, if you modify the Program, your modified version must prominently offer all users interacting with it remotely through a network (if your version supports such interaction) an opportunity to receive the Corresponding Source of your version by providing access to the Corresponding Source from a network server at no charge, through some standard or customary means of facilitating copying of software. This Corresponding Source shall include the Corresponding Source for any work covered by version 3 of the GNU General Public License that is incorporated pursuant to the following paragraph.
Notwithstanding any other provision of this License, you have permission to link or combine any covered work with a work licensed under version 3 of the GNU General Public License into a single combined work, and to convey the resulting work. The terms of this License will continue to apply to the part which is the covered work, but the work with which it is combined will remain governed by version 3 of the GNU General Public License.
- Revised Versions of this License.
The Free Software Foundation may publish revised and/or new versions of the GNU Affero General Public License from time to time. Such new versions will be similar in spirit to the present version, but may differ in detail to address new problems or concerns.
Each version is given a distinguishing version number. If the Program specifies that a certain numbered version of the GNU Affero General Public License “or any later version” applies to it, you have the option of following the terms and conditions either of that numbered version or of any later version published by the Free Software Foundation. If the Program does not specify a version number of the GNU Affero General Public License, you may choose any version ever published by the Free Software Foundation.
If the Program specifies that a proxy can decide which future versions of the GNU Affero General Public License can be used, that proxy’s public statement of acceptance of a version permanently authorizes you to choose that version for the Program.
Later license versions may give you additional or different permissions. However, no additional obligations are imposed on any author or copyright holder as a result of your choosing to follow a later version.
- Disclaimer of Warranty.
THERE IS NO WARRANTY FOR THE PROGRAM, TO THE EXTENT PERMITTED BY APPLICABLE LAW. EXCEPT WHEN OTHERWISE STATED IN WRITING THE COPYRIGHT HOLDERS AND/OR OTHER PARTIES PROVIDE THE PROGRAM “AS IS” WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. THE ENTIRE RISK AS TO THE QUALITY AND PERFORMANCE OF THE PROGRAM IS WITH YOU. SHOULD THE PROGRAM PROVE DEFECTIVE, YOU ASSUME THE COST OF ALL NECESSARY SERVICING, REPAIR OR CORRECTION.
- Limitation of Liability.
IN NO EVENT UNLESS REQUIRED BY APPLICABLE LAW OR AGREED TO IN WRITING WILL ANY COPYRIGHT HOLDER, OR ANY OTHER PARTY WHO MODIFIES AND/OR CONVEYS THE PROGRAM AS PERMITTED ABOVE, BE LIABLE TO YOU FOR DAMAGES, INCLUDING ANY GENERAL, SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES ARISING OUT OF THE USE OR INABILITY TO USE THE PROGRAM (INCLUDING BUT NOT LIMITED TO LOSS OF DATA OR DATA BEING RENDERED INACCURATE OR LOSSES SUSTAINED BY YOU OR THIRD PARTIES OR A FAILURE OF THE PROGRAM TO OPERATE WITH ANY OTHER PROGRAMS), EVEN IF SUCH HOLDER OR OTHER PARTY HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES.
- Interpretation of Sections 15 and 16.
If the disclaimer of warranty and limitation of liability provided above cannot be given local legal effect according to their terms, reviewing courts shall apply local law that most closely approximates an absolute waiver of all civil liability in connection with the Program, unless a warranty or assumption of liability accompanies a copy of the Program in return for a fee.
H.1.2 How to Apply These Terms to Your New Programs
If you develop a new program, and you want it to be of the greatest possible use to the public, the best way to achieve this is to make it free software which everyone can redistribute and change under these terms.
To do so, attach the following notices to the program. It is safest to attach them to the start of each source file to most effectively state the exclusion of warranty; and each file should have at least the “copyright” line and a pointer to where the full notice is found.
one line to give the program's name and a brief idea of what it does. Copyright (C) year name of author This program is free software: you can redistribute it and/or modify it under the terms of the GNU Affero General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version. This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Affero General Public License for more details. You should have received a copy of the GNU Affero General Public License along with this program. If not, see http://www.gnu.org/licenses/.
Also add information on how to contact you by electronic and paper mail.
If your software can interact with users remotely through a network, you should also make sure that it provides a way for users to get its source. For example, if your program is a web application, its interface could display a “Source” link that leads users to an archive of the code. There are many ways you could offer source, and different solutions will be better for different programs; see section 13 for the specific requirements.
You should also get your employer (if you work as a programmer) or school, if any, to sign a “copyright disclaimer” for the program, if necessary. For more information on this, and how to apply and follow the GNU AGPL, see http://www.gnu.org/licenses/.
H.2 GNU Free Documentation License
Copyright © 2000, 2001, 2002, 2007, 2008 Free Software Foundation, Inc. http://fsf.org/ Everyone is permitted to copy and distribute verbatim copies of this license document, but changing it is not allowed.
- PREAMBLE
The purpose of this License is to make a manual, textbook, or other functional and useful document free in the sense of freedom: to assure everyone the effective freedom to copy and redistribute it, with or without modifying it, either commercially or noncommercially. Secondarily, this License preserves for the author and publisher a way to get credit for their work, while not being considered responsible for modifications made by others.
This License is a kind of “copyleft”, which means that derivative works of the document must themselves be free in the same sense. It complements the GNU General Public License, which is a copyleft license designed for free software.
We have designed this License in order to use it for manuals for free software, because free software needs free documentation: a free program should come with manuals providing the same freedoms that the software does. But this License is not limited to software manuals; it can be used for any textual work, regardless of subject matter or whether it is published as a printed book. We recommend this License principally for works whose purpose is instruction or reference.
- APPLICABILITY AND DEFINITIONS
This License applies to any manual or other work, in any medium, that contains a notice placed by the copyright holder saying it can be distributed under the terms of this License. Such a notice grants a world-wide, royalty-free license, unlimited in duration, to use that work under the conditions stated herein. The “Document”, below, refers to any such manual or work. Any member of the public is a licensee, and is addressed as “you”. You accept the license if you copy, modify or distribute the work in a way requiring permission under copyright law.
A “Modified Version” of the Document means any work containing the Document or a portion of it, either copied verbatim, or with modifications and/or translated into another language.
A “Secondary Section” is a named appendix or a front-matter section of the Document that deals exclusively with the relationship of the publishers or authors of the Document to the Document’s overall subject (or to related matters) and contains nothing that could fall directly within that overall subject. (Thus, if the Document is in part a textbook of mathematics, a Secondary Section may not explain any mathematics.) The relationship could be a matter of historical connection with the subject or with related matters, or of legal, commercial, philosophical, ethical or political position regarding them.
The “Invariant Sections” are certain Secondary Sections whose titles are designated, as being those of Invariant Sections, in the notice that says that the Document is released under this License. If a section does not fit the above definition of Secondary then it is not allowed to be designated as Invariant. The Document may contain zero Invariant Sections. If the Document does not identify any Invariant Sections then there are none.
The “Cover Texts” are certain short passages of text that are listed, as Front-Cover Texts or Back-Cover Texts, in the notice that says that the Document is released under this License. A Front-Cover Text may be at most 5 words, and a Back-Cover Text may be at most 25 words.
A “Transparent” copy of the Document means a machine-readable copy, represented in a format whose specification is available to the general public, that is suitable for revising the document straightforwardly with generic text editors or (for images composed of pixels) generic paint programs or (for drawings) some widely available drawing editor, and that is suitable for input to text formatters or for automatic translation to a variety of formats suitable for input to text formatters. A copy made in an otherwise Transparent file format whose markup, or absence of markup, has been arranged to thwart or discourage subsequent modification by readers is not Transparent. An image format is not Transparent if used for any substantial amount of text. A copy that is not “Transparent” is called “Opaque”.
Examples of suitable formats for Transparent copies include plain ASCII without markup, Texinfo input format, LaTeX input format, SGML or XML using a publicly available DTD, and standard-conforming simple HTML, PostScript or PDF designed for human modification. Examples of transparent image formats include PNG, XCF and JPG. Opaque formats include proprietary formats that can be read and edited only by proprietary word processors, SGML or XML for which the DTD and/or processing tools are not generally available, and the machine-generated HTML, PostScript or PDF produced by some word processors for output purposes only.
The “Title Page” means, for a printed book, the title page itself, plus such following pages as are needed to hold, legibly, the material this License requires to appear in the title page. For works in formats which do not have any title page as such, “Title Page” means the text near the most prominent appearance of the work’s title, preceding the beginning of the body of the text.
The “publisher” means any person or entity that distributes copies of the Document to the public.
A section “Entitled XYZ” means a named subunit of the Document whose title either is precisely XYZ or contains XYZ in parentheses following text that translates XYZ in another language. (Here XYZ stands for a specific section name mentioned below, such as “Acknowledgements”, “Dedications”, “Endorsements”, or “History”.) To “Preserve the Title” of such a section when you modify the Document means that it remains a section “Entitled XYZ” according to this definition.
The Document may include Warranty Disclaimers next to the notice which states that this License applies to the Document. These Warranty Disclaimers are considered to be included by reference in this License, but only as regards disclaiming warranties: any other implication that these Warranty Disclaimers may have is void and has no effect on the meaning of this License.
- VERBATIM COPYING
You may copy and distribute the Document in any medium, either commercially or noncommercially, provided that this License, the copyright notices, and the license notice saying this License applies to the Document are reproduced in all copies, and that you add no other conditions whatsoever to those of this License. You may not use technical measures to obstruct or control the reading or further copying of the copies you make or distribute. However, you may accept compensation in exchange for copies. If you distribute a large enough number of copies you must also follow the conditions in section 3.
You may also lend copies, under the same conditions stated above, and you may publicly display copies.
- COPYING IN QUANTITY
If you publish printed copies (or copies in media that commonly have printed covers) of the Document, numbering more than 100, and the Document’s license notice requires Cover Texts, you must enclose the copies in covers that carry, clearly and legibly, all these Cover Texts: Front-Cover Texts on the front cover, and Back-Cover Texts on the back cover. Both covers must also clearly and legibly identify you as the publisher of these copies. The front cover must present the full title with all words of the title equally prominent and visible. You may add other material on the covers in addition. Copying with changes limited to the covers, as long as they preserve the title of the Document and satisfy these conditions, can be treated as verbatim copying in other respects.
If the required texts for either cover are too voluminous to fit legibly, you should put the first ones listed (as many as fit reasonably) on the actual cover, and continue the rest onto adjacent pages.
If you publish or distribute Opaque copies of the Document numbering more than 100, you must either include a machine-readable Transparent copy along with each Opaque copy, or state in or with each Opaque copy a computer-network location from which the general network-using public has access to download using public-standard network protocols a complete Transparent copy of the Document, free of added material. If you use the latter option, you must take reasonably prudent steps, when you begin distribution of Opaque copies in quantity, to ensure that this Transparent copy will remain thus accessible at the stated location until at least one year after the last time you distribute an Opaque copy (directly or through your agents or retailers) of that edition to the public.
It is requested, but not required, that you contact the authors of the Document well before redistributing any large number of copies, to give them a chance to provide you with an updated version of the Document.
- MODIFICATIONS
You may copy and distribute a Modified Version of the Document under the conditions of sections 2 and 3 above, provided that you release the Modified Version under precisely this License, with the Modified Version filling the role of the Document, thus licensing distribution and modification of the Modified Version to whoever possesses a copy of it. In addition, you must do these things in the Modified Version:
- Use in the Title Page (and on the covers, if any) a title distinct from that of the Document, and from those of previous versions (which should, if there were any, be listed in the History section of the Document). You may use the same title as a previous version if the original publisher of that version gives permission.
- List on the Title Page, as authors, one or more persons or entities responsible for authorship of the modifications in the Modified Version, together with at least five of the principal authors of the Document (all of its principal authors, if it has fewer than five), unless they release you from this requirement.
- State on the Title page the name of the publisher of the Modified Version, as the publisher.
- Preserve all the copyright notices of the Document.
- Add an appropriate copyright notice for your modifications adjacent to the other copyright notices.
- Include, immediately after the copyright notices, a license notice giving the public permission to use the Modified Version under the terms of this License, in the form shown in the Addendum below.
- Preserve in that license notice the full lists of Invariant Sections and required Cover Texts given in the Document’s license notice.
- Include an unaltered copy of this License.
- Preserve the section Entitled “History”, Preserve its Title, and add to it an item stating at least the title, year, new authors, and publisher of the Modified Version as given on the Title Page. If there is no section Entitled “History” in the Document, create one stating the title, year, authors, and publisher of the Document as given on its Title Page, then add an item describing the Modified Version as stated in the previous sentence.
- Preserve the network location, if any, given in the Document for public access to a Transparent copy of the Document, and likewise the network locations given in the Document for previous versions it was based on. These may be placed in the “History” section. You may omit a network location for a work that was published at least four years before the Document itself, or if the original publisher of the version it refers to gives permission.
- For any section Entitled “Acknowledgements” or “Dedications”, Preserve the Title of the section, and preserve in the section all the substance and tone of each of the contributor acknowledgements and/or dedications given therein.
- Preserve all the Invariant Sections of the Document, unaltered in their text and in their titles. Section numbers or the equivalent are not considered part of the section titles.
- Delete any section Entitled “Endorsements”. Such a section may not be included in the Modified Version.
- Do not retitle any existing section to be Entitled “Endorsements” or to conflict in title with any Invariant Section.
- Preserve any Warranty Disclaimers.
If the Modified Version includes new front-matter sections or appendices that qualify as Secondary Sections and contain no material copied from the Document, you may at your option designate some or all of these sections as invariant. To do this, add their titles to the list of Invariant Sections in the Modified Version’s license notice. These titles must be distinct from any other section titles.
You may add a section Entitled “Endorsements”, provided it contains nothing but endorsements of your Modified Version by various parties—for example, statements of peer review or that the text has been approved by an organization as the authoritative definition of a standard.
You may add a passage of up to five words as a Front-Cover Text, and a passage of up to 25 words as a Back-Cover Text, to the end of the list of Cover Texts in the Modified Version. Only one passage of Front-Cover Text and one of Back-Cover Text may be added by (or through arrangements made by) any one entity. If the Document already includes a cover text for the same cover, previously added by you or by arrangement made by the same entity you are acting on behalf of, you may not add another; but you may replace the old one, on explicit permission from the previous publisher that added the old one.
The author(s) and publisher(s) of the Document do not by this License give permission to use their names for publicity for or to assert or imply endorsement of any Modified Version.
- COMBINING DOCUMENTS
You may combine the Document with other documents released under this License, under the terms defined in section 4 above for modified versions, provided that you include in the combination all of the Invariant Sections of all of the original documents, unmodified, and list them all as Invariant Sections of your combined work in its license notice, and that you preserve all their Warranty Disclaimers.
The combined work need only contain one copy of this License, and multiple identical Invariant Sections may be replaced with a single copy. If there are multiple Invariant Sections with the same name but different contents, make the title of each such section unique by adding at the end of it, in parentheses, the name of the original author or publisher of that section if known, or else a unique number. Make the same adjustment to the section titles in the list of Invariant Sections in the license notice of the combined work.
In the combination, you must combine any sections Entitled “History” in the various original documents, forming one section Entitled “History”; likewise combine any sections Entitled “Acknowledgements”, and any sections Entitled “Dedications”. You must delete all sections Entitled “Endorsements.”
- COLLECTIONS OF DOCUMENTS
You may make a collection consisting of the Document and other documents released under this License, and replace the individual copies of this License in the various documents with a single copy that is included in the collection, provided that you follow the rules of this License for verbatim copying of each of the documents in all other respects.
You may extract a single document from such a collection, and distribute it individually under this License, provided you insert a copy of this License into the extracted document, and follow this License in all other respects regarding verbatim copying of that document.
- AGGREGATION WITH INDEPENDENT WORKS
A compilation of the Document or its derivatives with other separate and independent documents or works, in or on a volume of a storage or distribution medium, is called an “aggregate” if the copyright resulting from the compilation is not used to limit the legal rights of the compilation’s users beyond what the individual works permit. When the Document is included in an aggregate, this License does not apply to the other works in the aggregate which are not themselves derivative works of the Document.
If the Cover Text requirement of section 3 is applicable to these copies of the Document, then if the Document is less than one half of the entire aggregate, the Document’s Cover Texts may be placed on covers that bracket the Document within the aggregate, or the electronic equivalent of covers if the Document is in electronic form. Otherwise they must appear on printed covers that bracket the whole aggregate.
- TRANSLATION
Translation is considered a kind of modification, so you may distribute translations of the Document under the terms of section 4. Replacing Invariant Sections with translations requires special permission from their copyright holders, but you may include translations of some or all Invariant Sections in addition to the original versions of these Invariant Sections. You may include a translation of this License, and all the license notices in the Document, and any Warranty Disclaimers, provided that you also include the original English version of this License and the original versions of those notices and disclaimers. In case of a disagreement between the translation and the original version of this License or a notice or disclaimer, the original version will prevail.
If a section in the Document is Entitled “Acknowledgements”, “Dedications”, or “History”, the requirement (section 4) to Preserve its Title (section 1) will typically require changing the actual title.
- TERMINATION
You may not copy, modify, sublicense, or distribute the Document except as expressly provided under this License. Any attempt otherwise to copy, modify, sublicense, or distribute it is void, and will automatically terminate your rights under this License.
However, if you cease all violation of this License, then your license from a particular copyright holder is reinstated (a) provisionally, unless and until the copyright holder explicitly and finally terminates your license, and (b) permanently, if the copyright holder fails to notify you of the violation by some reasonable means prior to 60 days after the cessation.
Moreover, your license from a particular copyright holder is reinstated permanently if the copyright holder notifies you of the violation by some reasonable means, this is the first time you have received notice of violation of this License (for any work) from that copyright holder, and you cure the violation prior to 30 days after your receipt of the notice.
Termination of your rights under this section does not terminate the licenses of parties who have received copies or rights from you under this License. If your rights have been terminated and not permanently reinstated, receipt of a copy of some or all of the same material does not give you any rights to use it.
- FUTURE REVISIONS OF THIS LICENSE
The Free Software Foundation may publish new, revised versions of the GNU Free Documentation License from time to time. Such new versions will be similar in spirit to the present version, but may differ in detail to address new problems or concerns. See http://www.gnu.org/copyleft/.
Each version of the License is given a distinguishing version number. If the Document specifies that a particular numbered version of this License “or any later version” applies to it, you have the option of following the terms and conditions either of that specified version or of any later version that has been published (not as a draft) by the Free Software Foundation. If the Document does not specify a version number of this License, you may choose any version ever published (not as a draft) by the Free Software Foundation. If the Document specifies that a proxy can decide which future versions of this License can be used, that proxy’s public statement of acceptance of a version permanently authorizes you to choose that version for the Document.
- RELICENSING
“Massive Multiauthor Collaboration Site” (or “MMC Site”) means any World Wide Web server that publishes copyrightable works and also provides prominent facilities for anybody to edit those works. A public wiki that anybody can edit is an example of such a server. A “Massive Multiauthor Collaboration” (or “MMC”) contained in the site means any set of copyrightable works thus published on the MMC site.
“CC-BY-SA” means the Creative Commons Attribution-Share Alike 3.0 license published by Creative Commons Corporation, a not-for-profit corporation with a principal place of business in San Francisco, California, as well as future copyleft versions of that license published by that same organization.
“Incorporate” means to publish or republish a Document, in whole or in part, as part of another Document.
An MMC is “eligible for relicensing” if it is licensed under this License, and if all works that were first published under this License somewhere other than this MMC, and subsequently incorporated in whole or in part into the MMC, (1) had no cover texts or invariant sections, and (2) were thus incorporated prior to November 1, 2008.
The operator of an MMC Site may republish an MMC contained in the site under CC-BY-SA on the same site at any time before August 1, 2009, provided the MMC is eligible for relicensing.
ADDENDUM: How to use this License for your documents
To use this License in a document you have written, include a copy of the License in the document and put the following copyright and license notices just after the title page:
Copyright (C) year your name. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.3 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts. A copy of the license is included in the section entitled ``GNU Free Documentation License''.
If you have Invariant Sections, Front-Cover Texts and Back-Cover Texts, replace the “with…Texts.” line with this:
with the Invariant Sections being list their titles, with
the Front-Cover Texts being list, and with the Back-Cover Texts
being list.
If you have Invariant Sections without Cover Texts, or some other combination of the three, merge those two alternatives to suit the situation.
If your document contains nontrivial examples of program code, we recommend releasing these examples in parallel under your choice of free software license, such as the GNU General Public License, to permit their use in free software.
Glossary
- anchor
-
A STREAMS locking mechanism that prevents the removal of STREAMS modules with the
I_POPioctl. Anchors are placed on STREAMS modules by adding the ‘[anchor]’ flag toautopush(8)configuration files or directly with theI_ANCHORioctl. - autopush
-
A STREAMS mechanism that enables a pre-specified list of modules to be pushed automatically onto a Stream when a STREAMS device is opened. This mechanism is used only for administrative purposes.
- back-enable
-
To enable (by STREAMS) a preceding blocked queue’s
serviceprocedure when STREAMS determines that a succeeding queue has reached its low-water mark. - blocked
-
A queue’s
serviceprocedure that cannot be enabled due to flow control. - clone device
-
A STREAMS device that returns an unused major/minor device number when initially opened, rather than requiring the minor device to be specified by name in the
opencall. - close procedure
-
A routine that is called when a module is popped from a Stream or when a driver is closed. A pointer to this procedure is specified in the qi_qopen member of the
queue(9)structure associated with the read side of the module’s queue pair. - control Stream
-
A Stream above a multiplexing driver used to establish lower multiplexer connections. Multiplexed Stream configurations are maintained through the controlling Stream to a multiplexing driver.
- Device Driver Interface
-
An interface that facilitates driver portability across different UNIX system versions.
- device driver
-
A Stream component whose principle functions are handling an associated physical device and transforming data and information between the external interface and the Stream.
- Driver Kernel Interface
-
An interface between the UNIX system kernel and different types of drivers. It consists of a set of driver defined functions that are called by the kernel. These functions are entry points into a driver.
- downstream
-
A direction of data flow going from the Stream head toward a driver. Also called the write-side and output-side.
- driver
-
A module that forms the Stream end. It can be a device driver or a pseudo-device driver. It is a required component in STREAMS (except in STREAMS-based pipes and FIFOs), and is physically identical to a module. It typically handles data transfer between the kernel and a device and does little or no processing of data.
- enable
-
A term used to describe scheduling of a queue’s
serviceprocedure. - FIFO
-
First In, First Out. A term used in STREAMS for named pipes. This term is also used in queue scheduling.
- flow control
-
A STREAMS mechanism that regulates the rate of message transfer within a Strema and from user space into a Stream.
- hardware emulation module
-
A module required when the terminal line discipline is on a Stream but there is no terminal driver at the Stream end. This module recognizes all
termio(7)ioctls necessary to support terminal semantics specified bytermio(9)andtermios(9). - input side
-
A direction of data flow going from a driver toward the Stream head. Also called read-side and upstream.
- line discipline
-
A STREAMS module that performs
termio(7)canonical and non-canonical processing. It shares sometermio(7)processing with a driver in a STREAMS terminal subsystem. - lower Stream
-
A Stream connected beneath a multiplexing pseudo-device driver, by means of an
I_LINKorI_PLINKioctl. The far end of a lower Stream terminates at a device driver or another multiplexer driver. - master driver
-
A STREAMS-based device supported by the pseudo-terminal subsystem. It is the controlling part of the pseudo-terminal subsystem (also called ‘ptm’).
- message
-
One or more linked message blocks. A message is referenced by its first message block and its type is defined by the message type of that block.
- message block
-
A triplet consisting of a data buffer and associated control structures, a
msgb(9)structure, adatab(9)structure. It carries data or information, as identified by its message type, in a Stream. - message queue
-
A linked list of zero or more messages connected together.
- message type
-
A enumerated set of values identifying the contents of a message.
- module
-
A defined set of kernel-level routines and data structure used to process data, status, and control information on a Stream. It is an optional element, but there can be many modules in one Stream. It consists of a pair of queues (read queue and write queue), and it communicates to other components in a Stream by passing messages.
- multiplexer
-
A STREAMS mechanism that allows message to be routed among multiple Streams in the kernel. A multiplexing configuration includes at least one multiplexing pseudo-device driver connected to one or more upper Streams and one or more lower Streams.
- named Stream
-
A Stream, typically a pipe, with a name associated with it by way of a call to
fattach(3)(that is, amount(2)operation). This is different from a named pipe (FIFO) in two ways: a named pipe (FIFO) is unidirectional while a named Stream is bidirectional; a name Stream need not refer to a pipe, but can be another type of Stream. - open routine
-
A procedure in each STREAMS driver and module called by STREAMS on each
opensystem call made on the Stream. A module’sopenprocedure is also called when the module is pushed. - packet mode
-
A feature supported by the STREAMS-based pseudo-terminal subsystem. It is used to inform a process on the master side when state changes occur on the slave side of a pseudo-TTY. It is enabled by pushing a module called ‘pckt’ on the master side.
- persistent link
-
A connection below a multiplexer that can exist without having an open controlling Stream associated with it.
- pipe
-
See STREAMS-based pipe.
- pop
-
A term used when a module that is immediately below the Stream head is removed.
- pseudo-device driver
-
A software driver, not directly associated with a physical device, that performs functions internal to a Stream such as a multiplexer or
log(4)driver. - pseudo-terminal subsystem
-
A user interface identical to a terminal subsystem except that there is a process in place of a hardware device. It consists of at least a master device, slave device, line discipline module, and hardware emulation module.
- push
-
A term used when a module is inserted in a Stream immediately below the Stream head.
- pushable module
-
A module put between the Stream head and driver. It performs intermediate transformations on messages flowing between the Stream head and driver. A driver is a non-pushable module.
- put procedure
-
A routine in a module or driver associated with a queue that receives messages from the preceding queue. It is the single entry point into a queue from a preceding queue. It may perform processing on the message and will then generally either queue the message for subsequent processing by this queue’s
serviceprocedure, or will pass the message to theputprocedure of the following queue (usingputnext(9)). - queue
-
A data structure that contains status information, a pointer to routines processing message, and pointers for administering a Stream. It typically contains pointer to
putandserviceprocedures, a message queue, and private data. - read-side
-
A direction of data flow going from a driver toward the Stream head. Also called upstream and input-side.
- read queue
-
A message queue in a module or driver containing messages moving upstream. Associated with the
read(2s)system call and input from a driver. - remote mode
-
A feature available with the pseudo-terminal subsystem. It is used for applications that perform the canonical and echoing functions normally done by line discipline module and TTY driver. It enables applications on the master side to turn off the canonical processing.
- STREAMS Administrative Driver
-
A STREAMS Administrative Driver that provides an interface to the
autopush(8)mechanism. - schedule
-
To place a queue on the internal list of queues that will subsequently have their service procedure called by the STREAMS scheduler. STREAMS scheduling is independent of Linux process scheduling.
- service interface
-
A set of primitives that define a service at the boundary between a service user and a service provider and the rules (typically represented by a state machine) for allowable sequences of the primitives across the boundary. At a Stream/user boundary, the primitives are typically contained in the control part of a message; within a Stream, in
M_PROTOorM_PCPROTOmessage blocks. - service procedure
-
A module or driver routine associated with a queue that receives messages queue for it by the
putprocedure is called by the STREAMS scheduler. It may perform processing on the message and generally passes the message to theputprocedure of the following queue. - service provider
-
An entity in a service interface that responds to request primitives from the service user with response and event primitives.
- service user
-
An entity in a service interface that generates request primitives for the service provider and consumes response and event primitives.
- slave driver
-
A STREAMS-based device supported by the pseudo-terminal subsystem. It is also called ‘pts’ and works with a line discipline module and hardware emulation module to provide an interface to a user process.
- standard pipe
-
A mechanism for the unidirectional flow of data between two processes where data written by one process becomes data read by the other process.
- Stream
-
A kernel level aggregate created by connecting STREAMS components, resulting from an application of the STREAMS mechanism. The primary components are the Stream head, the driver (or Stream end), and zero or more pushable modules between the Stream head and driver.
- STREAMS-based pipe
-
A mechanism used for bidirectional data transfer implemented using STREAMS, and sharing the properties of STREAMS-based devices.
- Stream end
-
A Stream component furthest from the user process that contains a driver.
- Stream head
-
A Stream component closest to the user process. It provides the interface between the Stream and the user process.
- STREAMS
-
A kernel mechanism that provides the framework for network services and data communication. It defines interface standards for character input/output within the kernel, and between the kernel and user level. The STREAMS mechanism includes integral functions, utility routines, kernel facilities, and a set of structures.
- TTY driver
-
A STREAMS-based device used in a terminal subsystem.
- upper stream
-
A Stream that terminates above a multiplexing driver. The beginning of an upper Stream originates at the Stream head or another multiplexing driver.
- upstream
-
A direction of data flow going from a driver toward the Stream head. Also called read-side and input side.
- water mark
-
A limit value used in flow control. Each queue has a high-water mark and a low-water mark. The high-water mark value indicates the upper limit related to the number of bytes contained on the queue. When the queued character reaches its high water mark, STREAMS causes another queue that attempts to send a message to this queue to become blocked. When the characters in this queue are reduced to the low-water mark value, the other queue is unblocked by STREAMS.
- write queue
-
A message queue in a module or driver containing messages moving downstream. Associated with the
write(2s)system call and output from a user process. - write-side
-
A direction of data flow going from the Stream head toward a driver. Also called downstream and output side.
Index
| Jump to: | A B C D E F H I L M N O P Q R S T U W X |
|---|
| Jump to: | A B C D E F H I L M N O P Q R S T U W X |
|---|
Short Table of Contents
- Preface
- 1 Introduction
- 2 Overview
- 3 Mechanism
- 4 Processing
- 5 Messages
- 6 Polling
- 7 Modules and Drivers
- 8 Modules
- 9 Drivers
- 10 Multiplexing
- 11 Pipes and FIFOs
- 12 Terminal Subsystem
- 13 Synchronization
- 14 Reference
- 15 Conformance
- 16 Portability
- 17 Developing Portable STREAMS Modules
- Appendix A Data Structures
- Appendix B Message Types
- Appendix C Utilities
- Appendix D Debugging
- Appendix E Configuration
- Appendix F Administration
- Appendix G Examples
- Appendix H Copying
- Glossary
- Index
Table of Contents
- Preface
- 1 Introduction
- 2 Overview
- 3 Mechanism
- 4 Processing
- 5 Messages
- 6 Polling
- 7 Modules and Drivers
- 8 Modules
- 9 Drivers
- 10 Multiplexing
- 11 Pipes and FIFOs
- 12 Terminal Subsystem
- 13 Synchronization
- 13.1 MT Configuration
- 13.2 Synchronous Entry Points
- 13.3 Synchronous Callbacks
- 13.4 Synchronous Callouts
- 13.5 Asynchronous Entry Points
- 13.6 Asynchronous Callbacks
- 13.7 Asynchronous Callouts
- 13.8 STREAMS Framework Integrity
- 13.9 MP Message Ordering
- 13.10 MP-UNSAFE Modules
- 13.11 MP-SAFE Modules
- 13.12 Stream Integrity
- 14 Reference
- 15 Conformance
- 16 Portability
- 16.1 Core Function Support
- 16.2 SVR 4.2 Portability
- 16.3 AIX Portability
- 16.4 HP-UX Portability
- 16.5 OSF/1 Portability
- 16.6 UnixWare Portability
- 16.7 Solaris Portability
- 16.8 SUX Portability
- 16.9 UXP Portability
- 17 Developing Portable STREAMS Modules
- 17.1 Memory Allocation
- 17.2 Alignment of Message Buffers
- 17.3 Disabling and Enabling Queue Procedures
- 17.4 Freezing and Unfreezing Streams
- 17.5 Passing Messages from Interrupt Service Routines
- 17.6 Timeout Call Back and Link Identifiers
- 17.7 Synchronization with Timeouts and Callback Functions
- 17.8 Synchronization with Callout Functions
- 17.9 Synchronization of Drivers and Modules
- 17.10 Special STREAMS Message Types
- 17.11 Use of Message Allocation Priorities
- 17.12 Registration and Deregistration
- 17.13 Device Numbering
- Appendix A Data Structures
- Appendix B Message Types
- Appendix C Utilities
- Appendix D Debugging
- Appendix E Configuration
- Appendix F Administration
- Appendix G Examples
- Appendix H Copying
- Glossary
- Index
Footnotes
(1)
La Direction des Services de la Navigation Aérienne - La Direction Général de l’Aviation Civile
(2)
Deutsches Zentrum für Luft- unde Raumfarht
(3)
Federal Aviation Administration - William J. Hughes Technical Center
(4)
Ecole Nationale Supérieure des Télécommunications
(5)
Hochschule für Technik und Wirtschaft des Saarlandes
(6)
Formerly X/Open and UNIX International.
(7)
A Stream Input-Output System, AT&T Bell Laboratories Technical Journal 63, No. 8 Part 2 (October, 1984), pp. 1897-1910.
(8)
For example, AIX.
(9)
For example, HP-UX
(10)
XPG 4.2/XNS 4.2, XPG 5/XNS 5, POSIX/SUSv2 XSI Extensions and POSIX/SUSv3 XSR Extensions.
(11)
Unlike the native Linux pipes and FIFOs that use the older UNIX System V Release 3 or BSD approaches to these facilities.
(12)
An exception is STREAMS-based pipes, that are opened with the
pipe(2s)
system call.
(13)
See ITU-T Recommendation X.200 and ITU-T Recommendation X.210 for more information about service primitive interfaces.
(14)
SS7 MTP over ISDN LAPB was originally defined under ISDN as an E-Channel.
(15)
Although the
poll(2s) system call has been
implemented in GNU/Linux, it was historically provided only by STREAMS. This is
evident from the fact that
poll(2s) system can supports events like POLLRDBAND
that have no meaning outside of the STREAMS framework.
(16)
However, for the purpose of the STREAMS executive, most implementations cache a
pointer to the Stream head in the queue(9) structure.
(17)
This is different that the situation in the UNIX System V Release 4.2 system and other UNIX variants in the following respects: In SVR 4.2 all FIFOs are STREAMS-based. In other UNIX implementations FIFOs are either SVR 3.2-style or, in some systems, optionally STREAMS-based. In SVR 4.2 FIFOs are FIFO special files. In other UNIX implementations, FIFOs are character special files. Under GNU/Linux, system FIFOs are by default SVR 3.2-style FIFOs. To acheive the greatest possible degree of compatibility, OpenSS7 provides the option of making all GNU/Linux system FIFOs STREAMS-based, and also provides a character special file implementation of STREAMS-based FIFOs.
(18)
For example, a FIFO opened read-only will block waiting for another process to open the FIFO for writing.
(19)
Note that, by default, GNU/Linux system pipes obtained
with the pipe(2s) system call are SVR 3.2-style unidirectional pipes.
OpenSS7 provides a pipe(2s) library function in the libstreams
library that can be used to override the normal pipe(2s) system call for some applications
programs. Also, OpenSS7 provides the option of overriding all system pipes
returned by the pipe(2s) system call to be bidirectional STREAMS-based pipes.
(20)
Some UNIX implementations, notably UnixWare, provide the
ability to open two character special files and associate them together into a STREAMS-based
pipe (see sfx(4)). In that case, opening each end of a STREAMS-based pipe is no
different than opening a regular STREAMS driver.
(21)
Some UNIX implementations, and UNIX System V Release 4,
provide a separate file system, the pipefs, upon which vnodes are created. In a
simlar fashion, GNU/Linux SVR 3.2-style system pipes also allocates inodes from
a pipefs file system.
(22)
Examples of differences include that pipes issue
SIGPIPE when the Stream encounters an error, that is, the SNDPIPE write
option is enabled, and pipe cannot send zero-length data by default, that is, the SNDZERO
write option is disabled. Both of these are the reverse for a regular Stream.
(23)
Exceptions are when the
Stream has been named with fattach(8), that is, it is still mounted, or when
the Stream is still linked under a multiplexing driver.
(24)
Note that the messges are not queued on the Stream head write-side queue and so no delay in closing the Stream head queue pair is considered.
(25)
These commands are fictitious.
(26)
Under some restricted circumstances, a module or
driver put procedure is run under a user context when invoked from a Stream head, or
under an interrupt service routine or software interrupt when invoked from a Stream end
(driver).
(27)
The qi_putp procedure should not be called directly.
(28)
In special
circumstances, such as in a Stream end or driver, it is possible to use putq(9) to place
a message on a queue to be later retreived by the driver’s service procedure; however,
this practice is the same as seting the driver’s qi_putp pointer to putq(9).
(29)
Because the
Interrupt Service Routine (ISR) stack is particularly limited, put(9s) should not be
called from ‘in_irq()’ context under Linux, execution of put(9s) should be
deferred by the ISR, either with an immediate bottom half procedure (i.e., software interrupt), or
by placing messages on the driver queue and processing from the queue’s service
proceedure: either of which run with a full kernel stack instead of an interrupt stack.
(30)
M_PASSFP is never passed on the Stream but is placed on one Stream head directly by the opposite Stream head of a STREAMS-based pipe.
(31)
Transparent ioctls support applications developed prior to the introduction of STREAMS.
(32)
Ibid.
(33)
Ibid.
(34)
Note that OpenSS7 does not include the b_pad2 member to reduce the size of the triplet and provide more room for a cache-aligned internal data buffer.
(35)
System V Release 4 Programmer’s Guide: STREAMS.
(36)
This is an old SVR 3.1 member that was used to contain the internal data buffer. It is not longer at this location and this member is not present in OpenSS7.
(37)
This
member is used by some implementations to locate the initial msgb(9) structure allocated
with this data block as a 3-tuple. OpenSS7 calculates this address from the
address of the data block itself and discards this member to reduce the overall size of the 3-tuple
and to increase the cache-aligned size of the internal data buffer.
(38)
OpenSS7 discards this field to reduce the overall size of the structure and to increase the cache-aligned size of the internal data buffer.
(39)
Some SVR 4.2-based implementations also provide the M_HPDATA message
for passing high priority data in the same fashion as M_DATA messages.
(40)
For a complete applications framework based on STREAMS and service interfaces, see the ADAPTIVE Communications Environment (ACE) communications framework
(41)
One example of backwards compatibility to a character device driver implemented under STREAMS is the STREAM implementation of terminal and pseudo-terminal devices.
(42)
The RFILL option is not defined by
SVR 4.2, but is defined by some implementations based on SVR 4.2.
(43)
Note
that earlier releases, such as UNIX System V Release 3.0, did not support read protocols.
Under these earlier implementations, the read protocol was always RPROTNORM.
(44)
This
setting is used with the timod(4) module requiring the use of the tirdwr(4) module
for use with the xti(3) library.
(45)
This may be useful for specialized libraries or at the user’s option with
timod(4) or sockmod(4) modules.
(46)
This setting is used with the sockmod(4) module,
or at the user’s option with other modules or drivers.
(47)
The RPROCOMPRESS option is not defined by SVR 4.2,
but is defined by some implementations based on SVR 4.2.
(48)
The
practise of calling a neighbouring module’s put or service procedure directly using the
qi_putp or qi_srvp members of the qinit(9) structure is long deprecated
and has not been seen in drivers since SVR 3.
(49)
Modules are not permitted to sleep outside of their queue open and close
procedures. Attempting to sleep in a put or service procedure will panic most
kernels.
(50)
That is, they are
invoked from a module’s put or service procedure, or from within another
synchronous callback, but not within a module’s open or close procedures.
(51)
It is only true for Linux 2.4 kernels that it is necessary for the module to keep track of these things. Under recent Linux 2.6 and 3.x kernels, it is possible for the STREAMS executive to determine the module owner of the callback function and Linux Fast-STREAMS performs the necessary module reference counting.
(52)
The Magic Garden Explained
Copyright © 2014 OpenSS7 Corporation All Rights Reserved.